This are very disjoint notes I took long ago. I would recommend using this for practice qs and perhaps equation review after you have a solid understanding of the chapters. My other notes are much more comprehensive, I swear! :)
1. Kinematics #
Four Primary Equations #
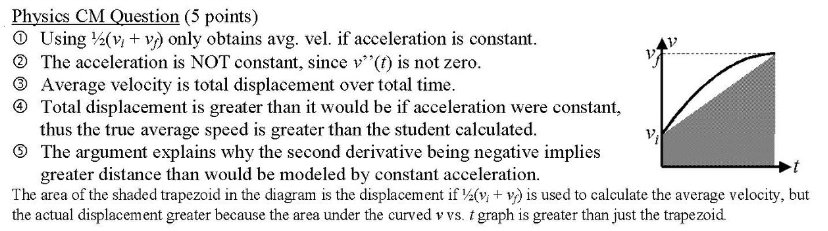
- $$\Delta x=\frac{1}{2}(v_f-v_i)\Delta t \text{ – no } a$$
- $$v_f=v_i+a\Delta t \text{ – no } x$$
- $$\Delta x=v_i \Delta t+\frac{1}{2}a \Delta t^2 \text{ – no } v_f$$ $$\Delta x=v_f \Delta t-\frac{1}{2}a \Delta t^2 \text{ – no } v_i$$
- $$v_f^2=v_i^2+2a \Delta x \text{ – no } t$$
- Used when .$a$cceration is constant
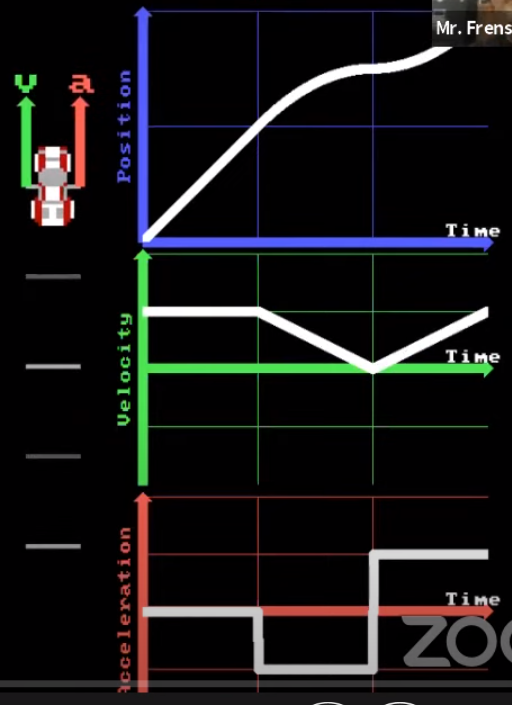
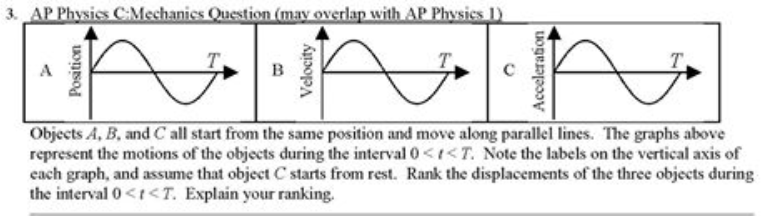
Slope and Area #
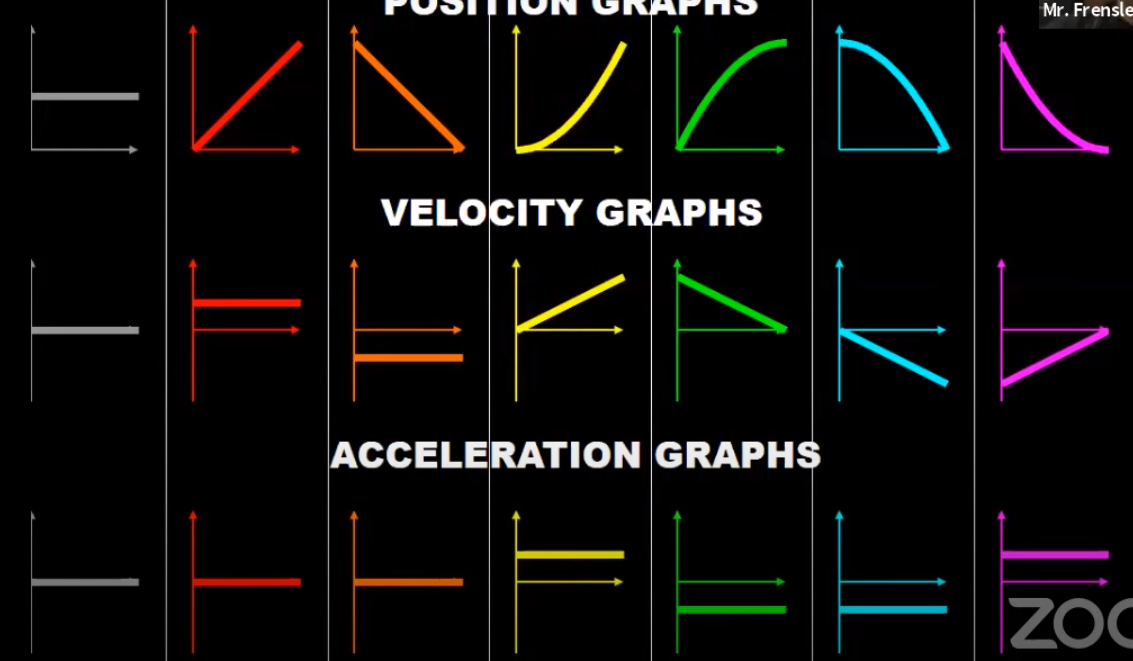
Top is .$x$, middle is .$v$, bottom is .$a$
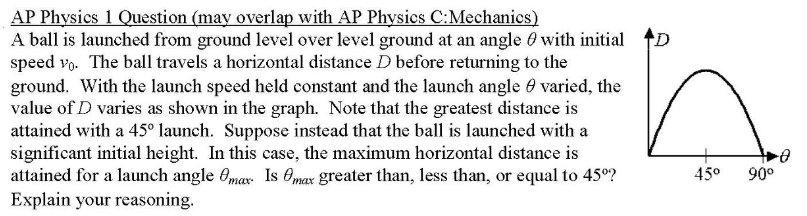
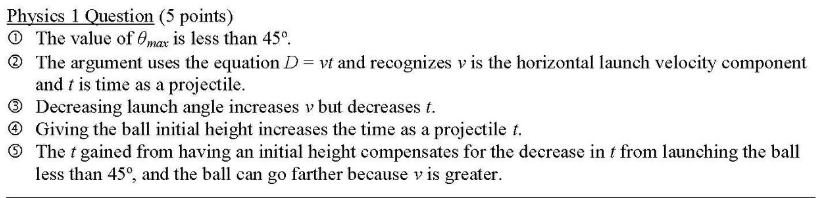
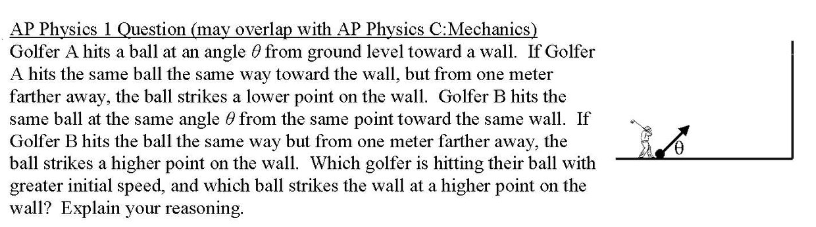
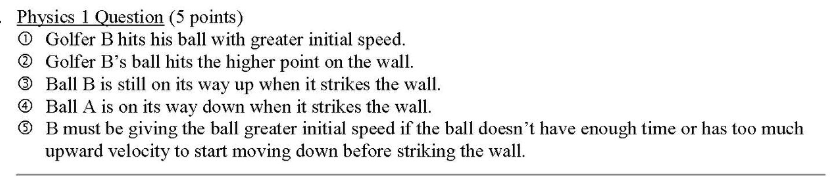
Projectile Motion #
- Half of parabolic flight time: $$t_\text{top}=\frac{v_i*\sin\theta}{g}$$
- Peak in .$y$ direction: $$y_\text{max}=\frac{v_i*\sin^2\theta}{2g}$$
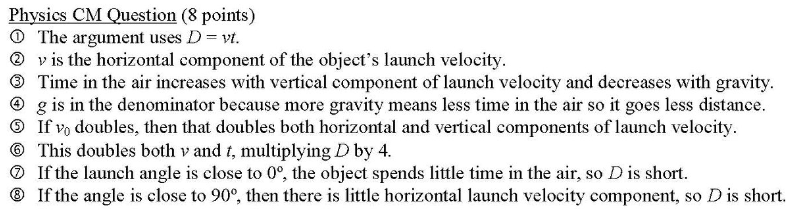
- Distance traveled in .$x$ direction: $$x_\text{max}=\frac{v_i*\sin2\theta}{g}$$
- Desmos tools
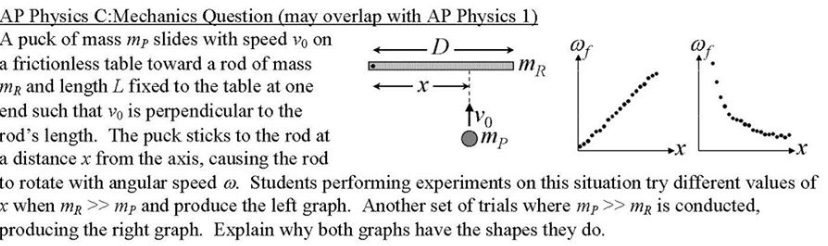
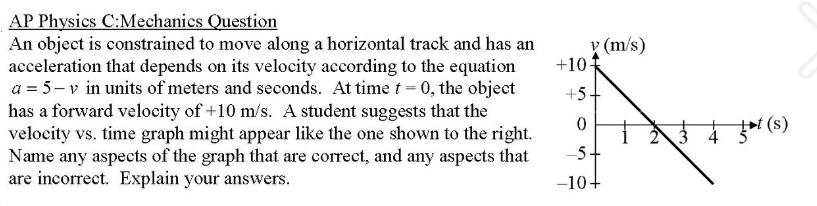
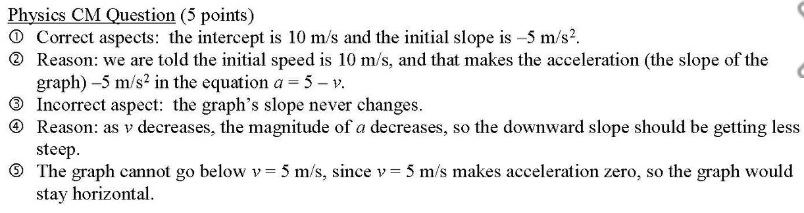
Practice #
FRQs to study
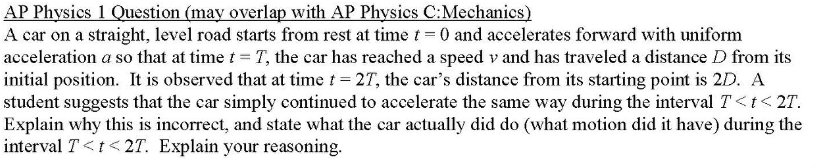
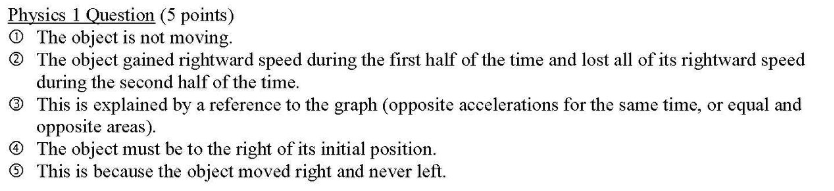
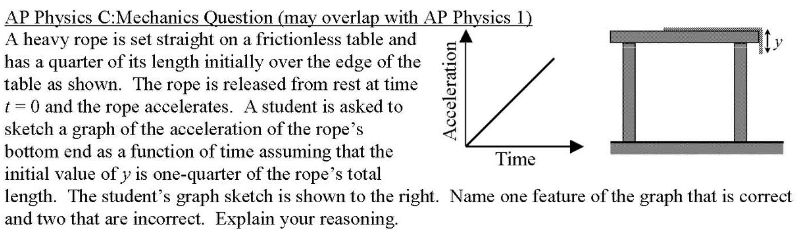
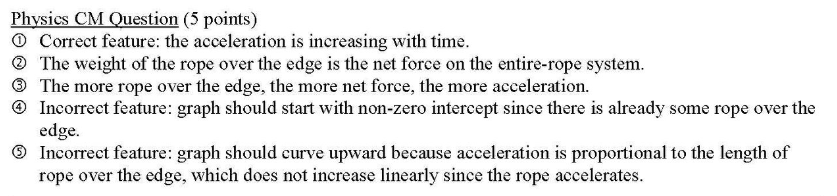
- Graphs

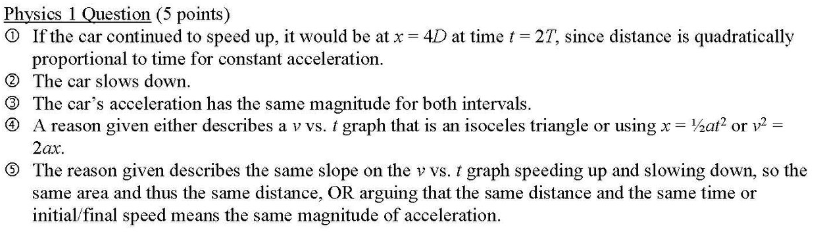
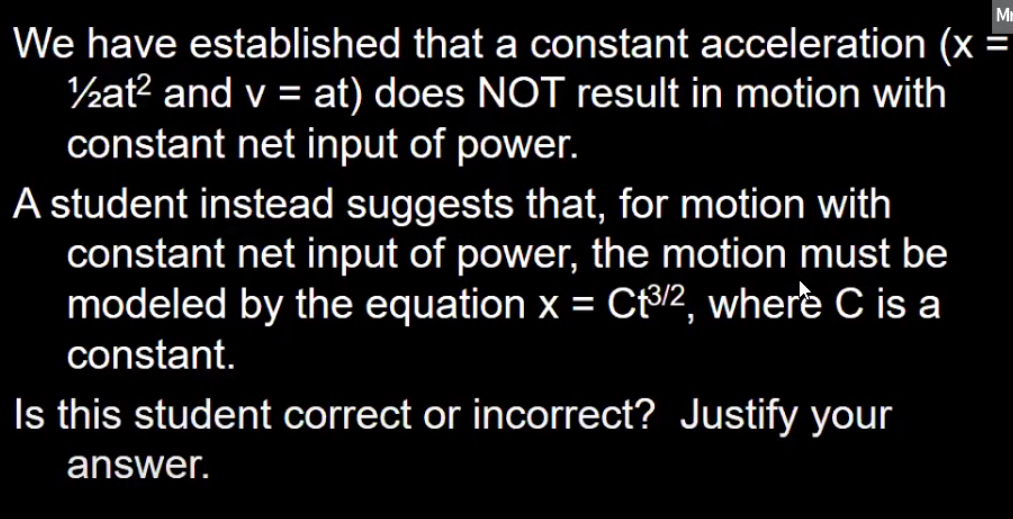
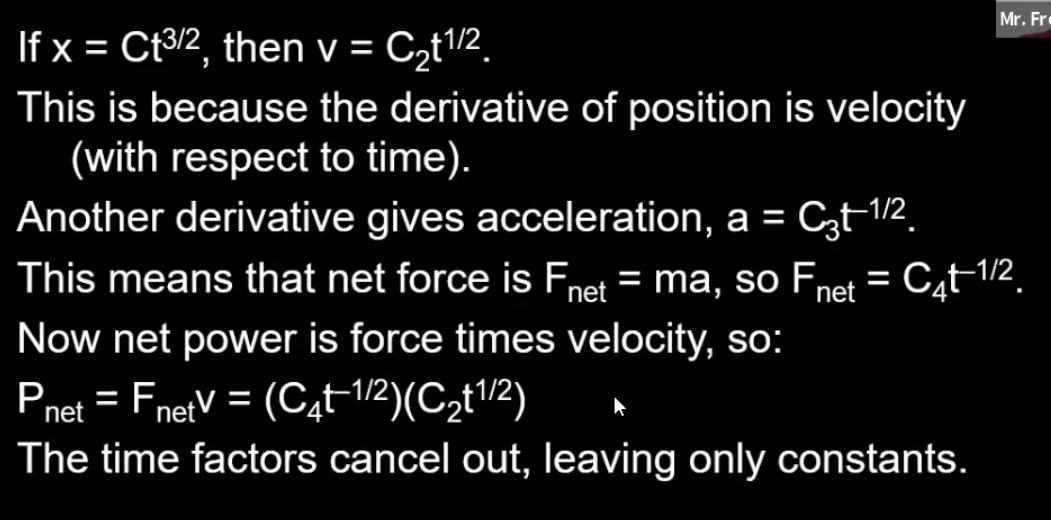
- Changing Acceleration / Velocity
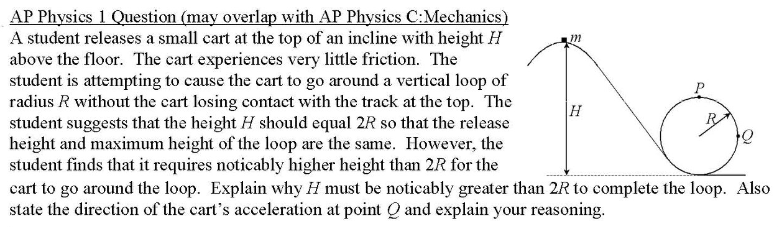
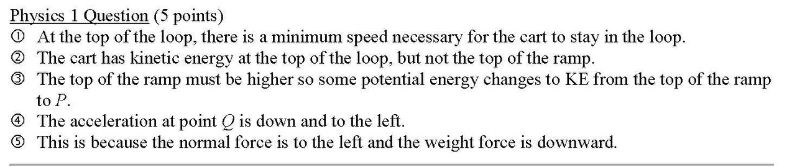
Example Qs
1.
 2.
2.
 3.
3.

 4.
4.
 5.
5.
 6.
6.
 7.
7.

 8.
8.


2. Forces #
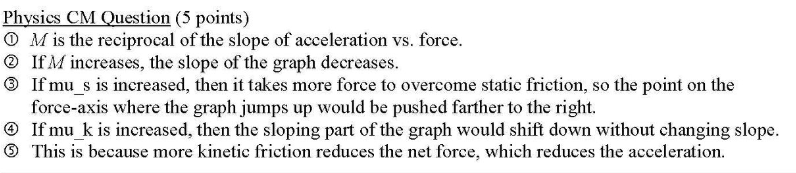
- .$N = \text{kg m/s}^2$ – a force of 1N causes a 1kg mass to accelerate at 1ms.$^{-2}$
- Normal doesn’t always equal mg!
Friction #
- Kinetic friction only acts when the force breaks past the static friction threshold
- The friction force is always the lesser of .$\mu \cdot N$ or the force it’s resisting $$F_s \le \mu_s \cdot F_N$$
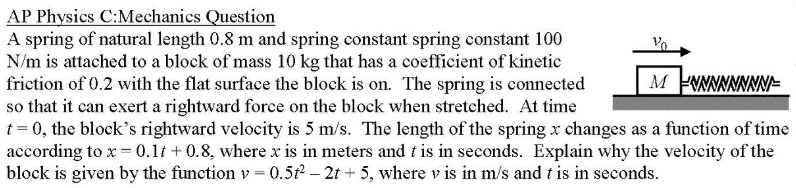
Spring #
$$F_\text{spring} = -kx$$
$$k=\frac{\Delta F}{\Delta x}$$
- Thus, the slope .$\Delta y / \Delta x$ of a force vs. distance is .$k$
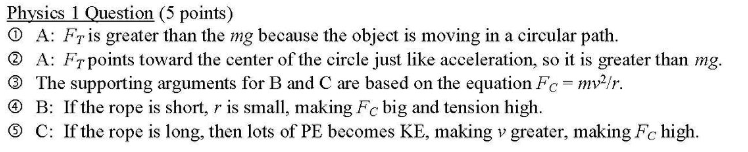
Centripital #
$$F_\text{centripetal} = \frac{mv^2}{r}$$
Gravity #
$$mg\sin(θ) = F_\text{gx} \text{ – Acceleration down ramp w/no friction}$$ $$mg\cos(θ) = F_\text{gy} \text{ – Normal force when no other forces act in the y direction}$$
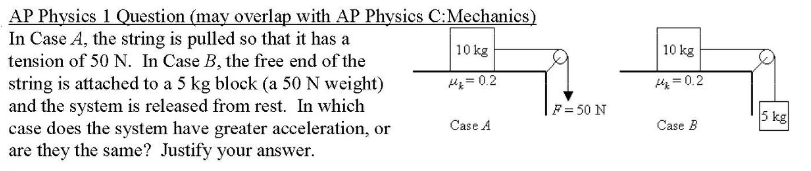
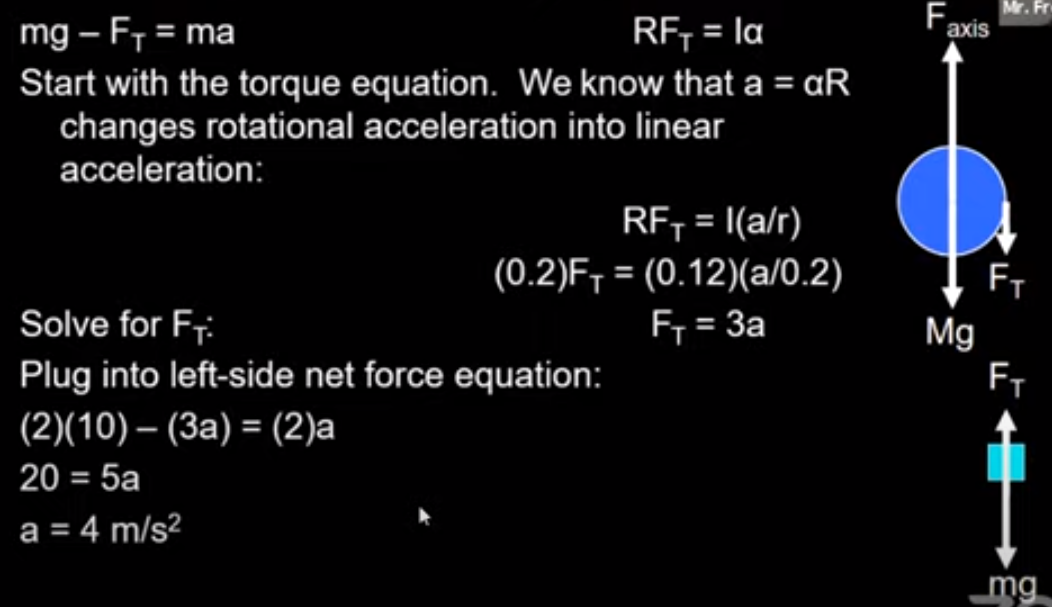
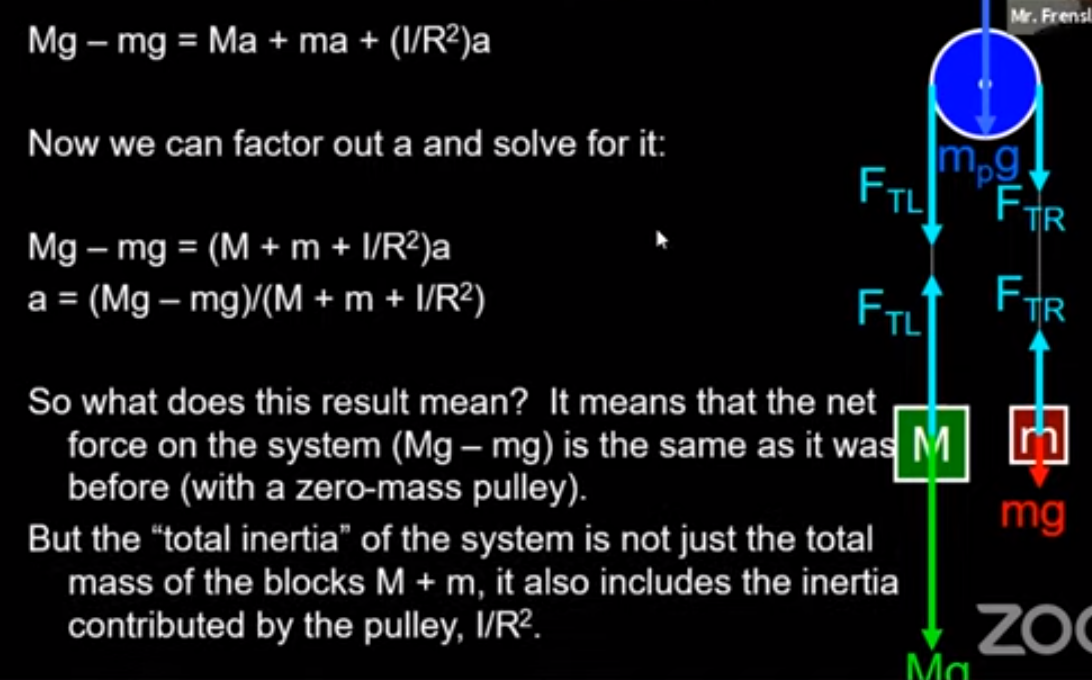
Pulleys + Atwoods #
$$\text{Acceleration of a Pulley} = \frac{Mg}{m+M} = \frac{Mg-\mu mg}{m+M}$$
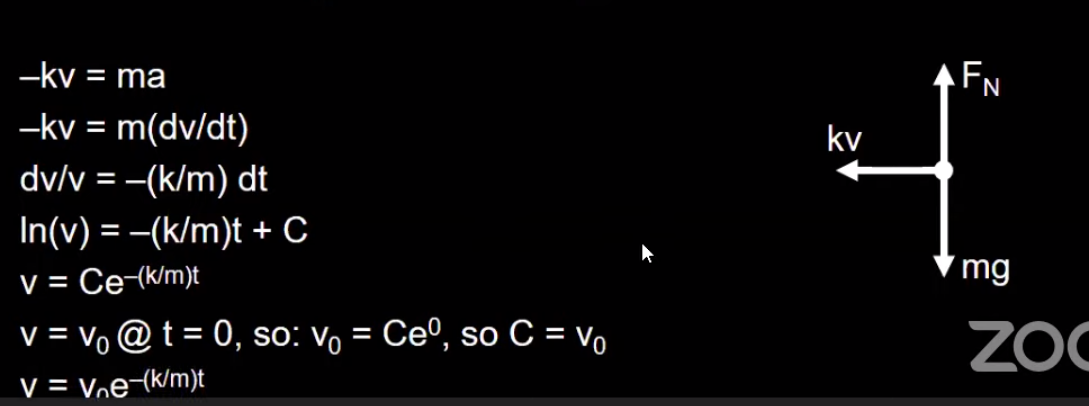
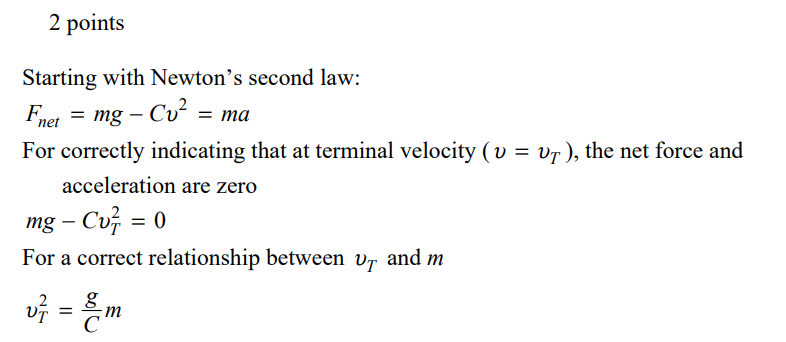
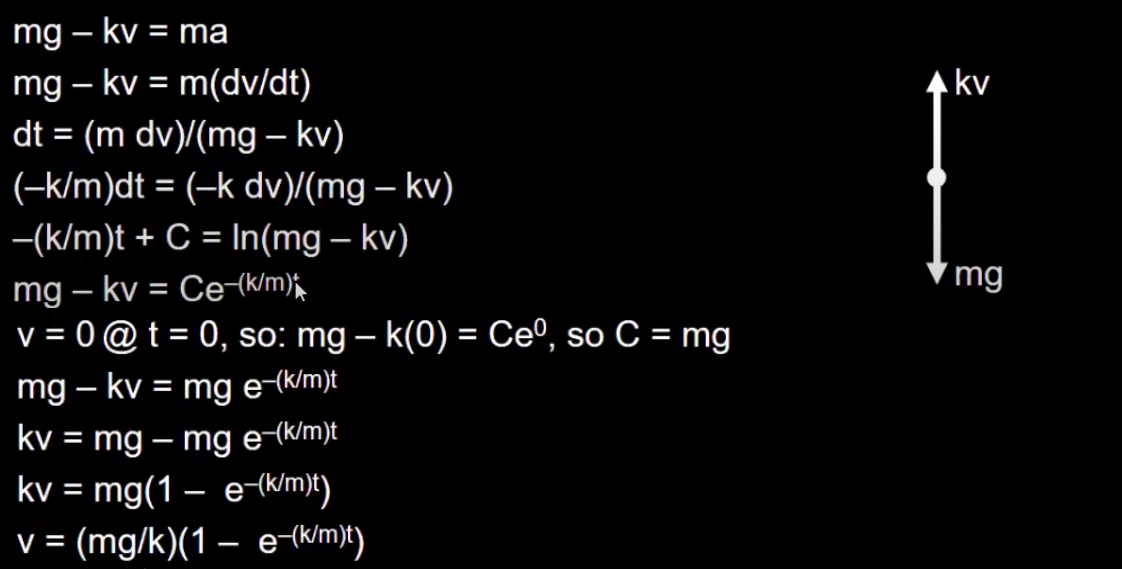
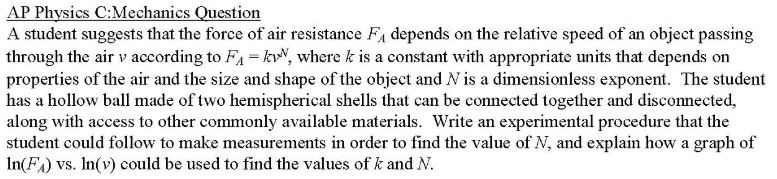
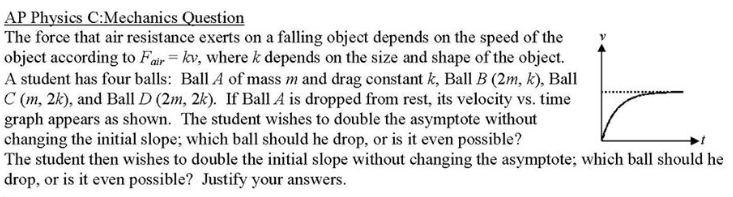
Drag Force #
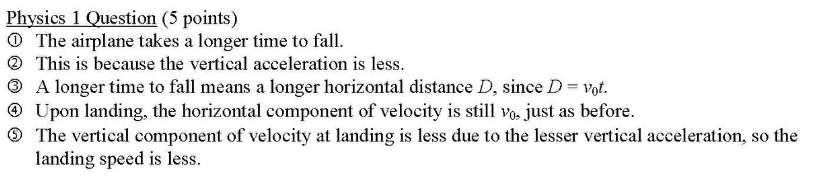
- Drag on x-axis:
- Drag on y-axis:
Practice #
FRQs to study
 Multiple Bodies (pulleys, carts)
Multiple Bodies (pulleys, carts)

Practice Qs






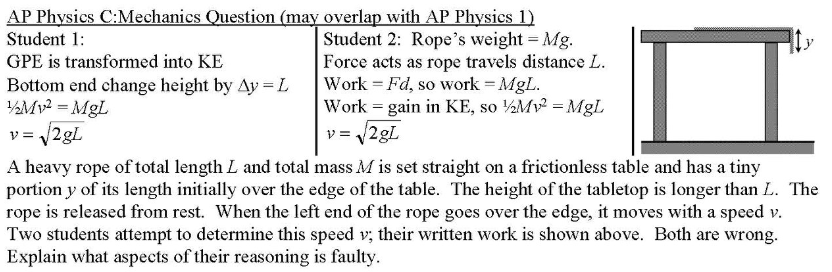




3. Energy #
Work #
$$W = \int F\ dx = \vec F_\parallel \cdot x = +\Delta KE = -\Delta PE = \int P dt$$
- Force parallel to distance traveled
- If force is opposing motion and acceleration changes, work stays the same
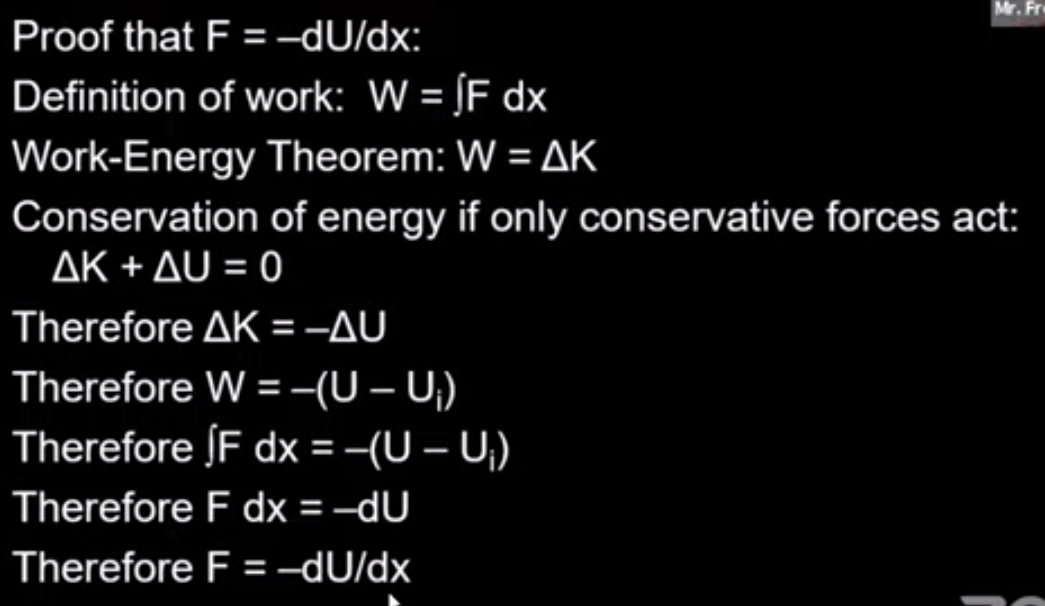
Potential #
$$F = -\frac{dU}{dx}$$
- Potential Energy can only depend on position
- Negative relation with force indicates that the direction of the force is always towards lower PE
- Derivation
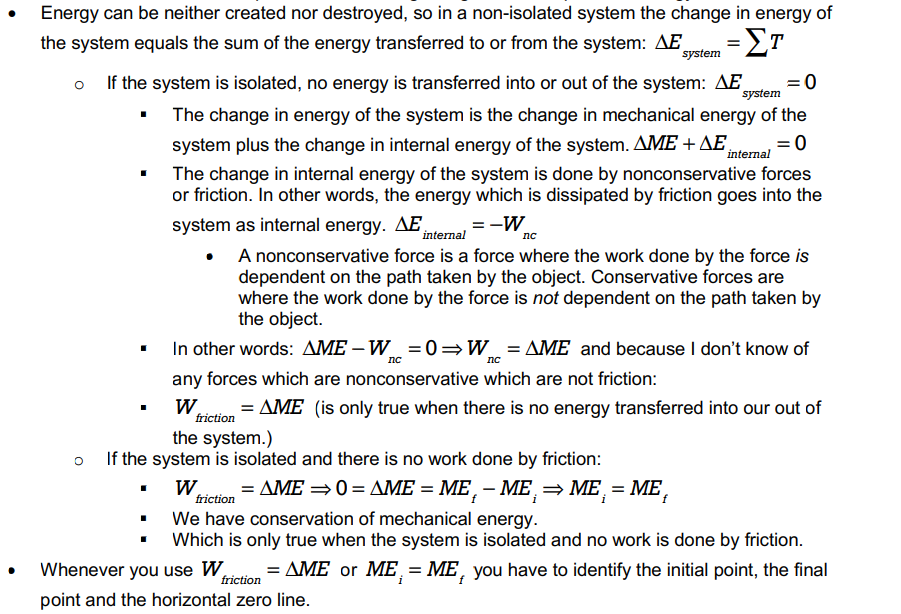
Conservation #
Consider the total work done by a force that acts on a particle as the particle moves around a closed path and returns to its starting point. If this total work is zero, we call the force a conservative force. If the total work for the round trip is not zero, we call the force a non-conservative force. Consider the work done by a force that acts on an object as the object moves from an initial position to a final position along any arbitrarily chosen path. If this work is the same for all such paths, we call the force a conservative force. If the work is not the same for all paths, we call the force a non-conservative force.
$$\Delta K + \Delta U + \Delta E_\text{int}= W_\text{ext}$$
- Conservative — NO external forces
- Mechanical Energy conserved; ME = ME'
- Gravity, Spring Force
- Always have a potential energy associated with it
- Conservative force’s magnitude and direction only depend on the object’s location, not on how the object is moving
- Non-conservative — external force present
- Mechanical Energy lost; ME > ME'
- Friction, Air resistance (drag)
- Internal Energy
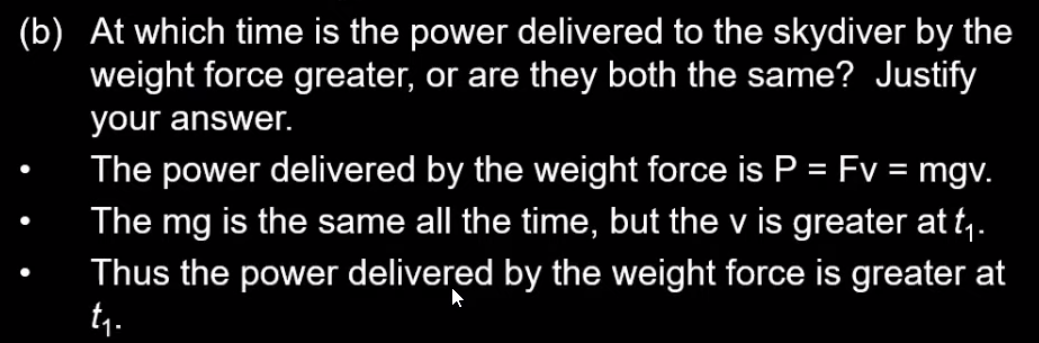
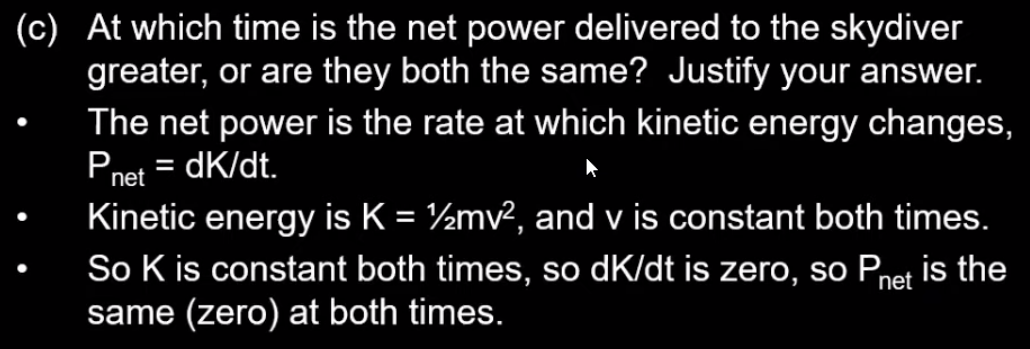
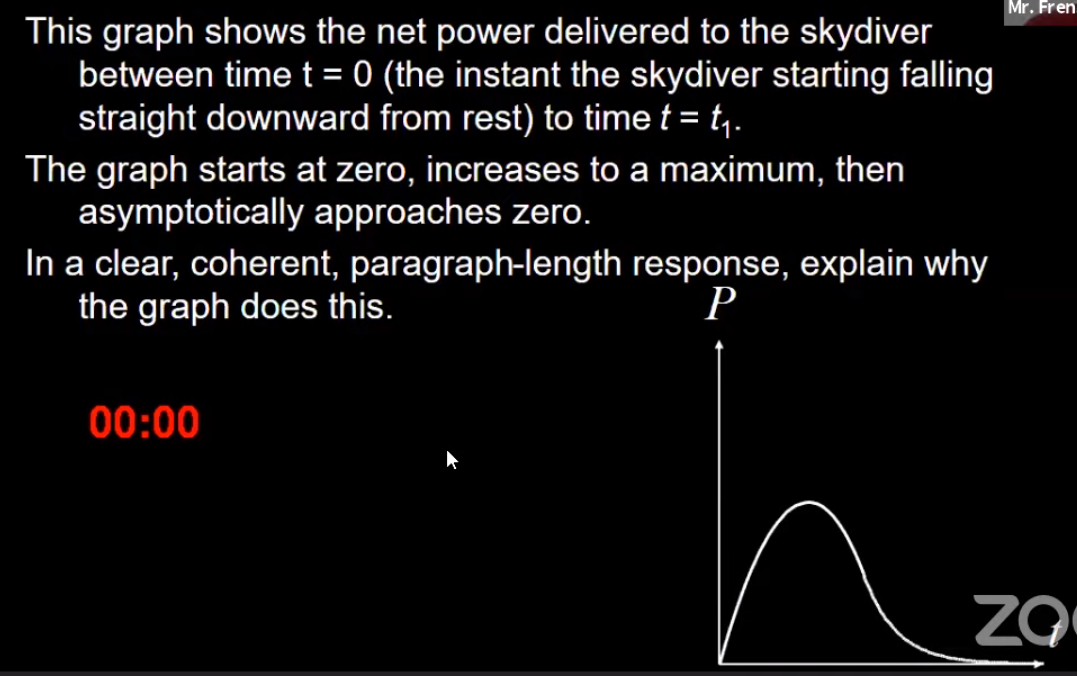
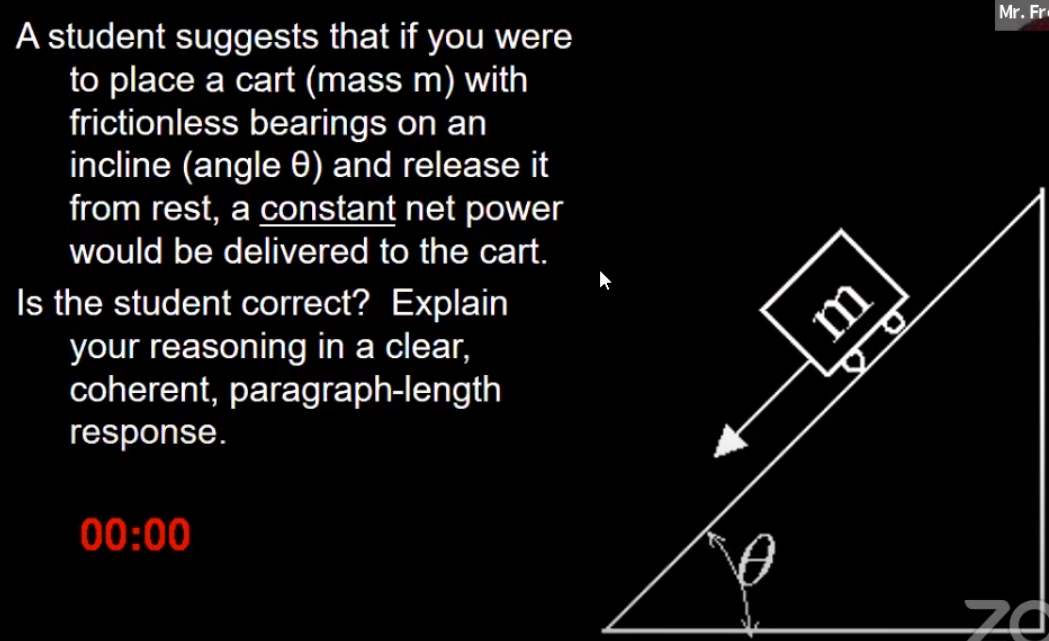
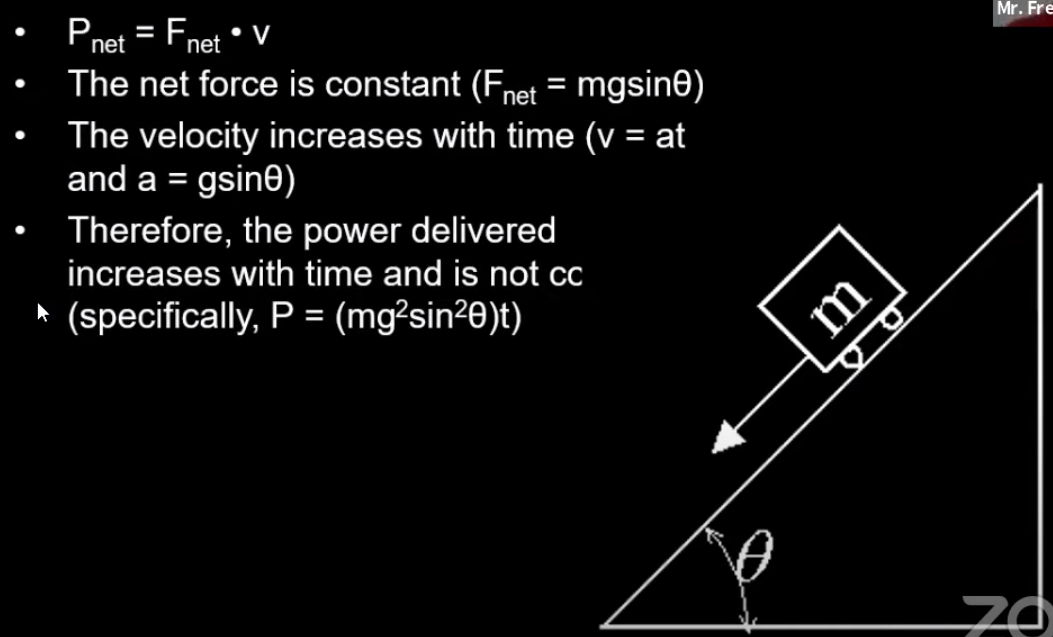
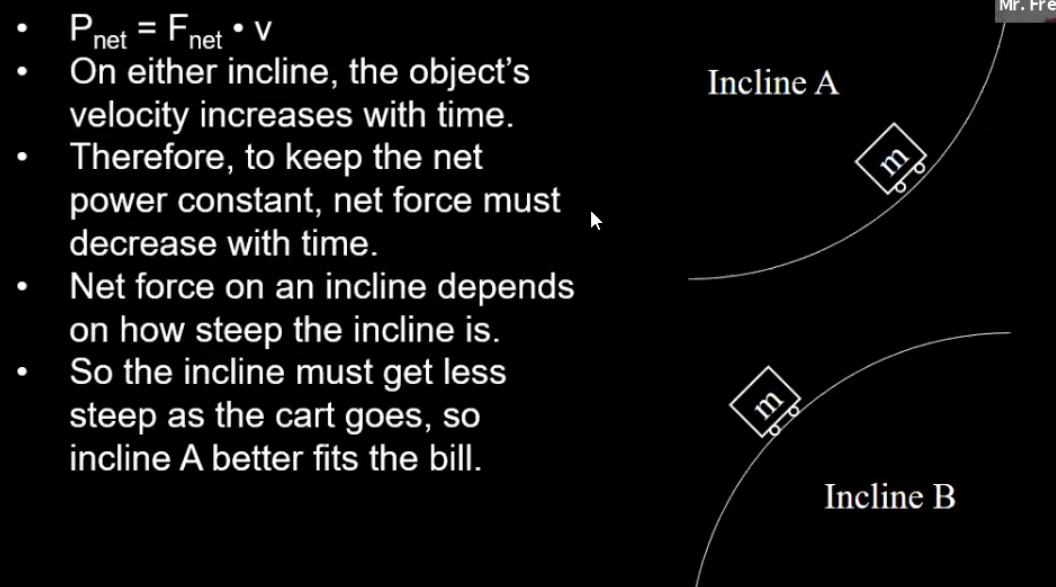
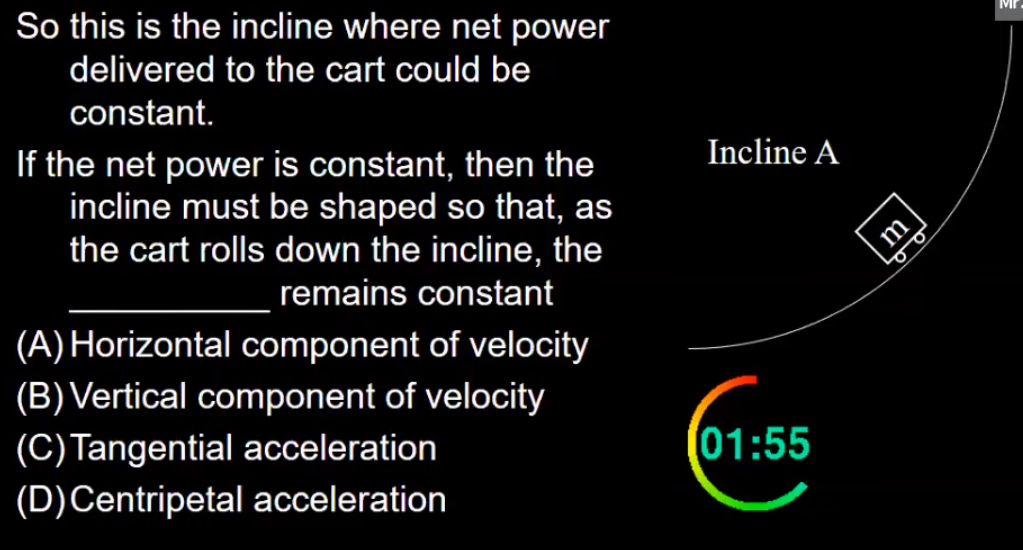
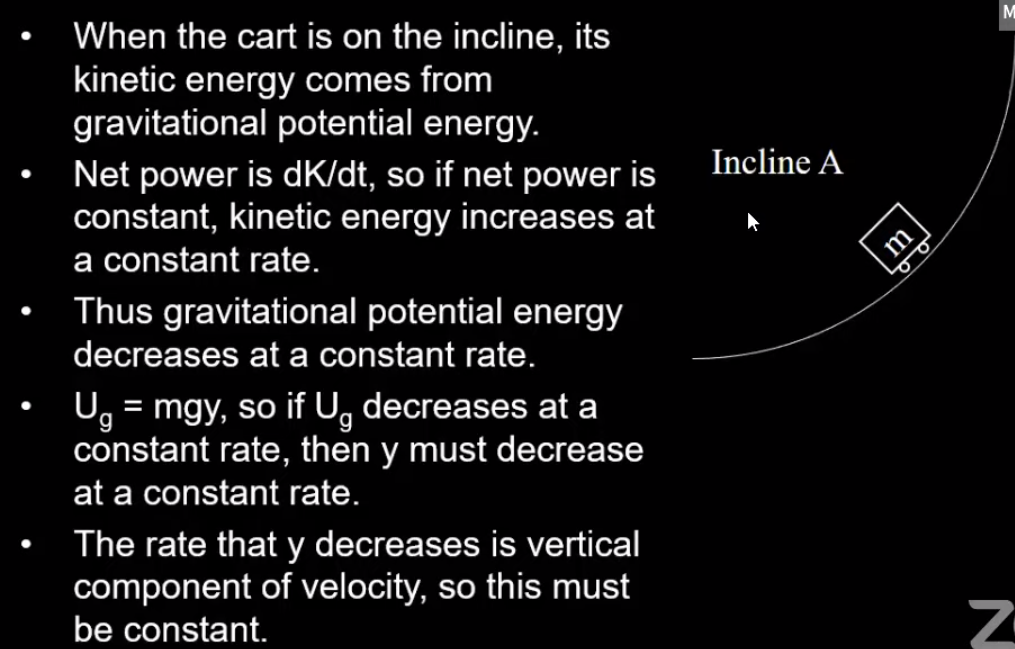
Power #
Rate at which work is done $$P=\frac{dW}{dt}=\frac{dKE}{dt}=\frac{W}{t}=\vec F \cdot \vec v$$
Springs #
$$W_\text{spring}=\int F_\text{spring} dx= \int (-kx)dx = -\frac{1}{2}kx^2 $$ $$U_\text{spring} = -W_\text{spring}=\frac{1}{2}kx^2$$
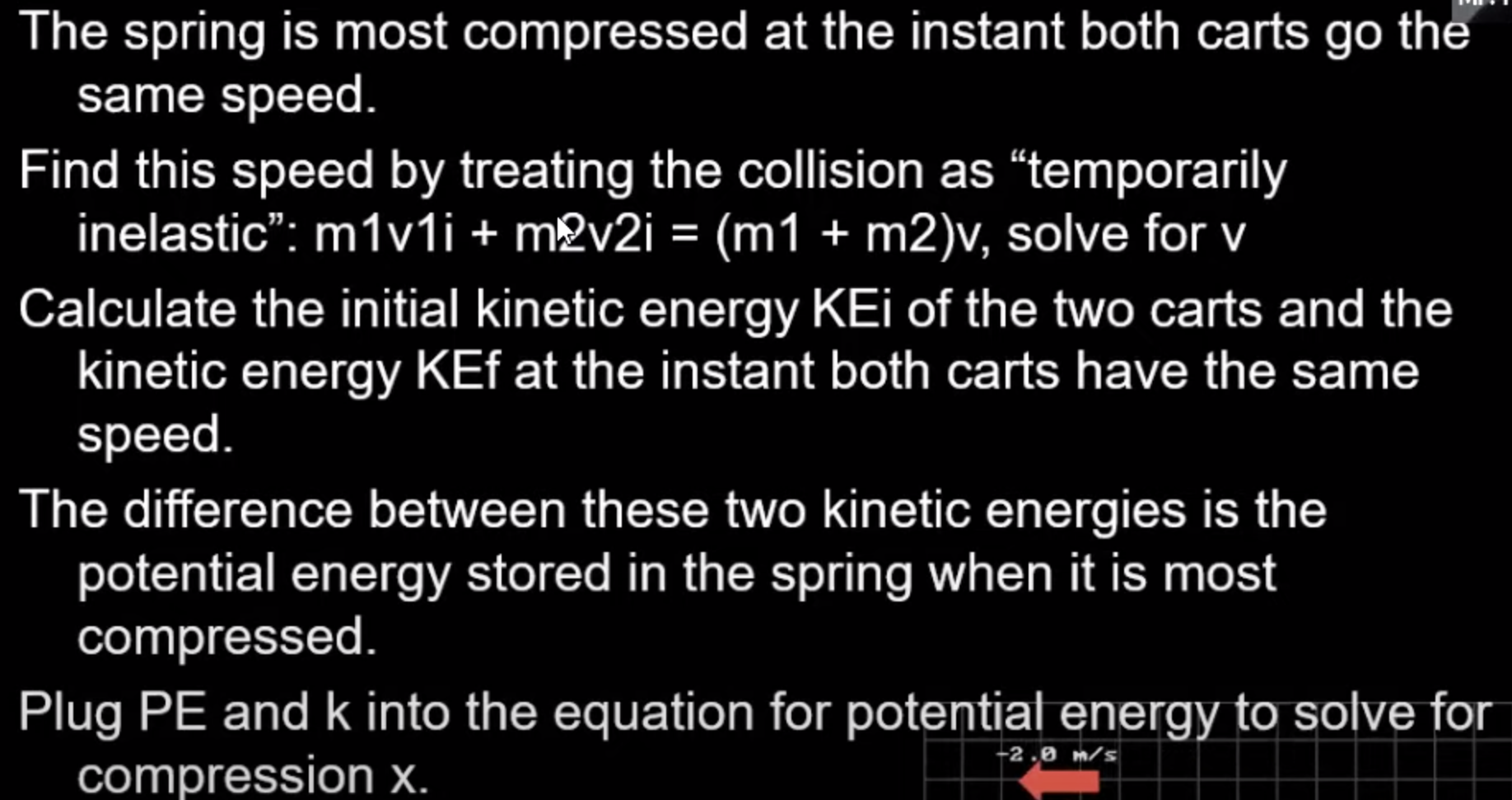
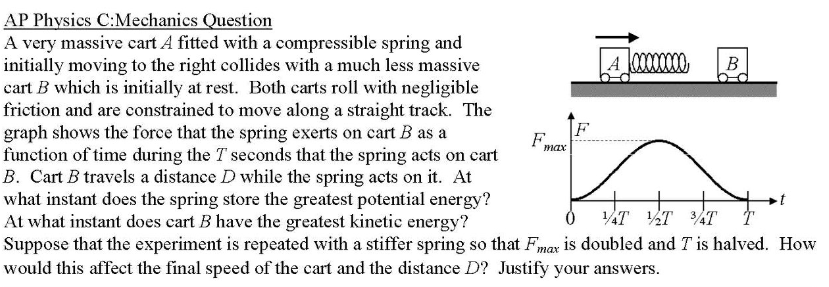
- Springs are most compressed in collisions when velocity of both objects are equal
- Therefore, we can treat the system as inelastic at that moment
- Steps
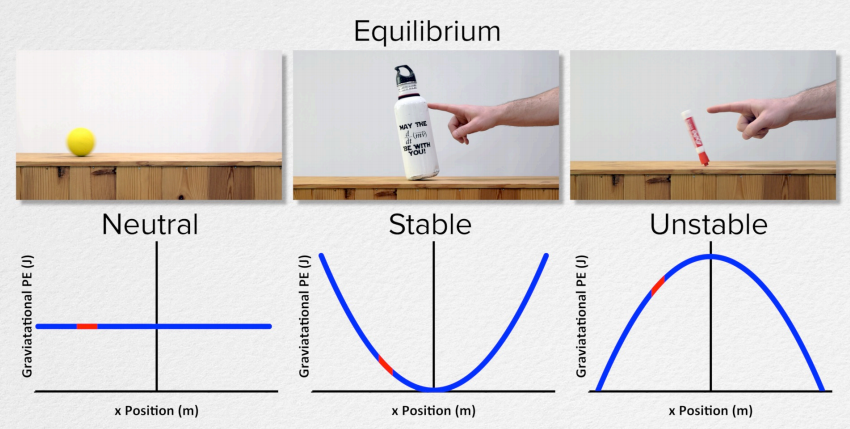
Equilibrium #
- Neutral Equilibrium is where the Potential Energy of the object remains constant regardless of position. For example, a ball rolling on a level surface.
- Stable Equilibrium is where the Potential Energy of the object increases as the position of the object moves away from the equilibrium position and therefore the object naturally returns to the equilibrium position. For example, a water bottle being tipped to the side.
- Unstable Equilibrium is where the Potential Energy of the object decreases as the position of the
object moves away from the equilibrium position and therefore the object naturally moves away
from the equilibrium position. For example, a marker being tipped to the side.
Practice #
Practice Qs








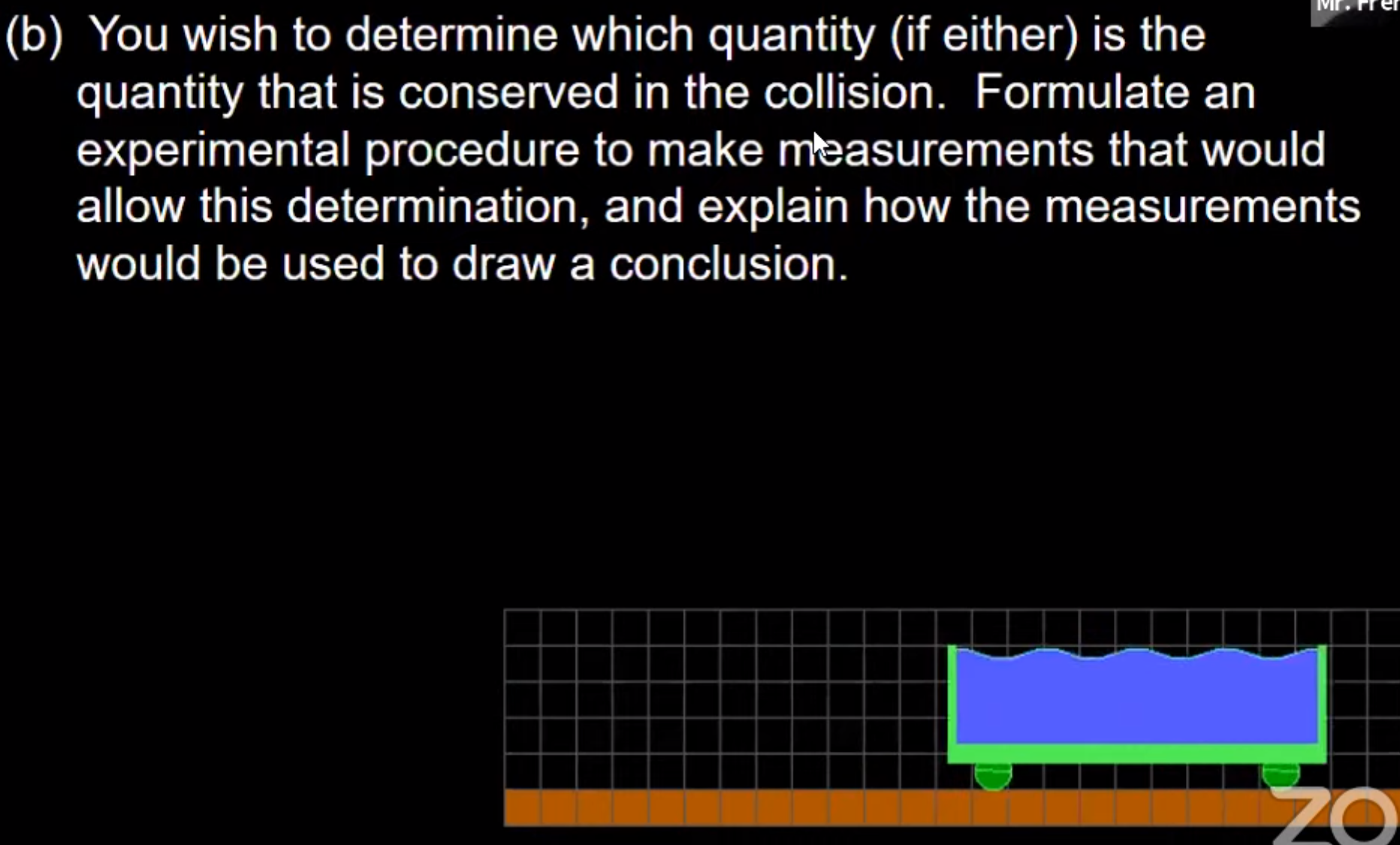
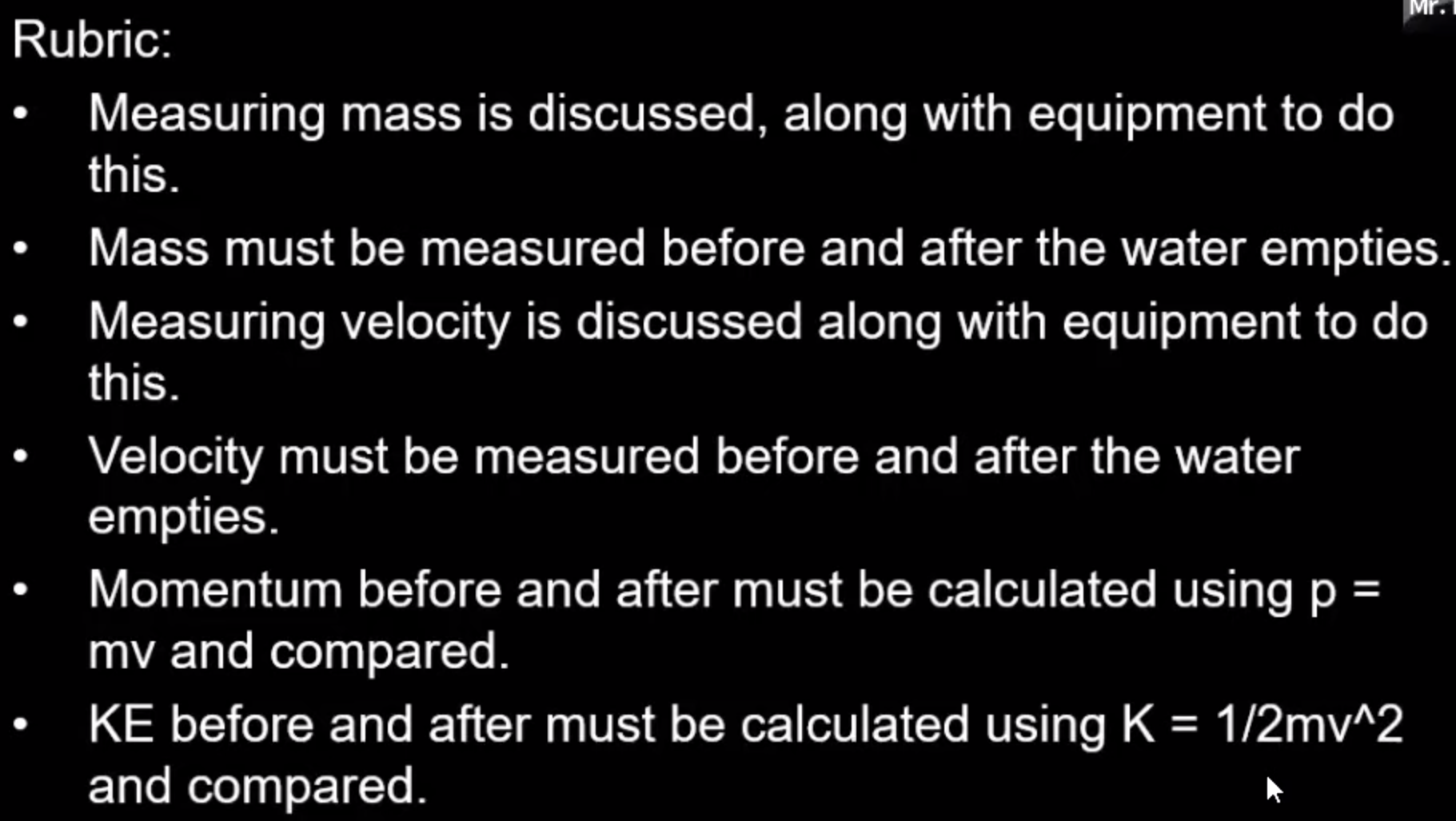
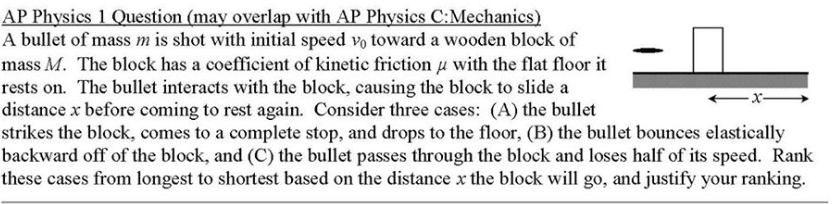
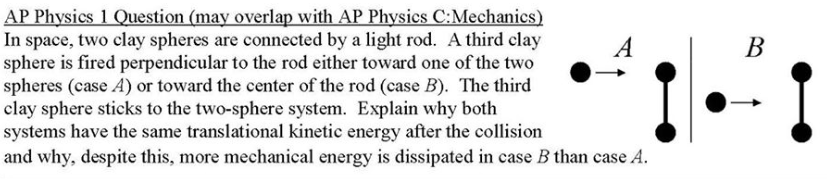
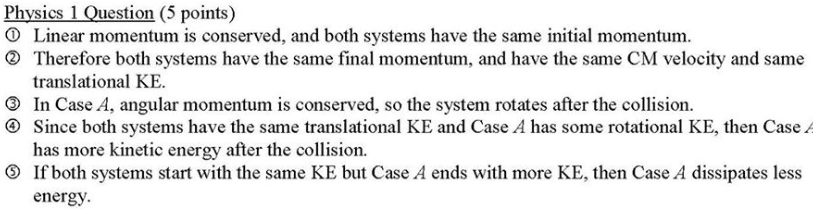
4. Momentum #
Collisions #
Elastic — bounce off #
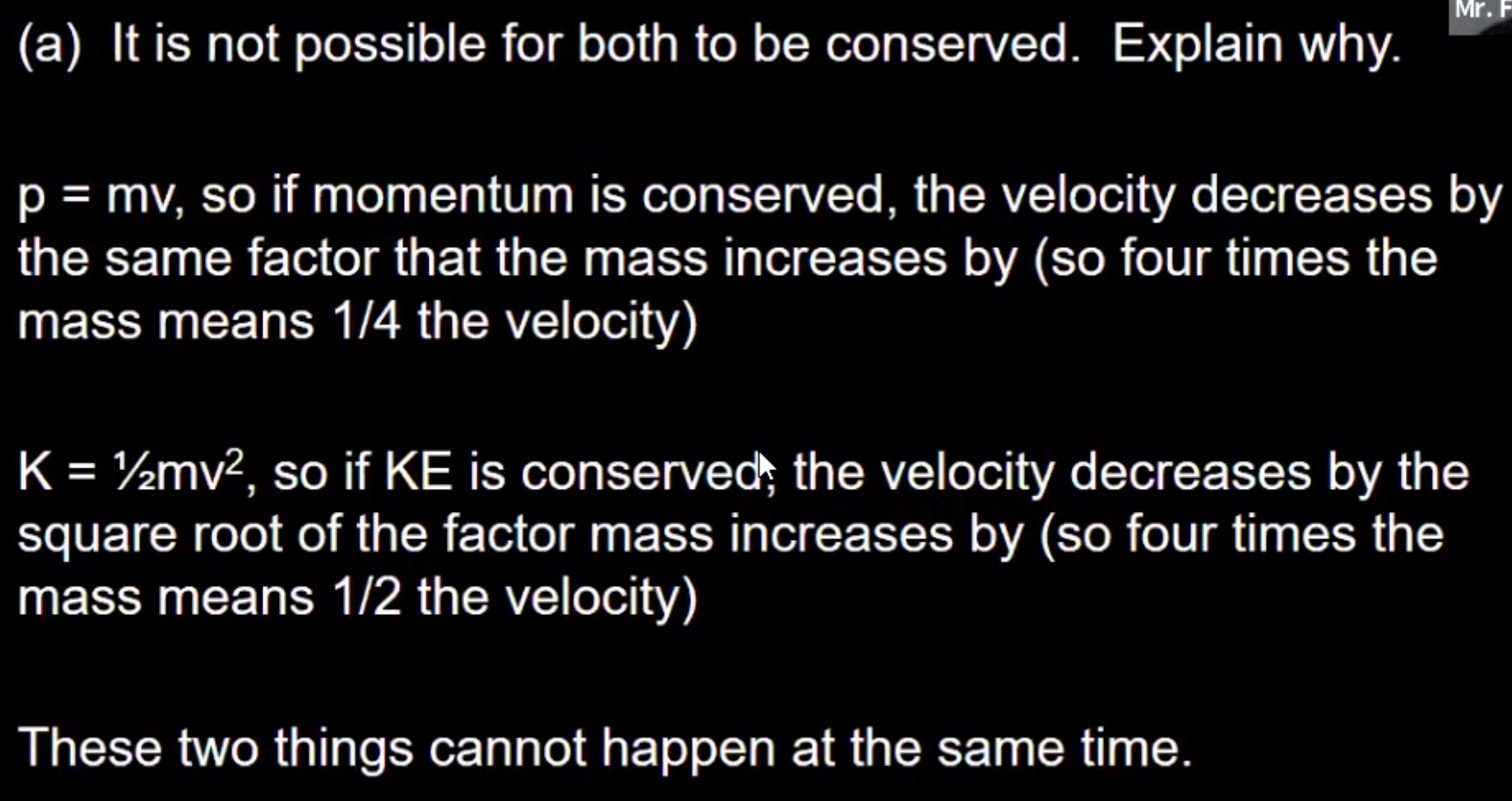
- KE conserved
- Momentum conserved (while no unbalanced ext forces)
- If the final velocity of an object is less than half of the initial velocity of the object (v_i/2), then the object it’s colliding with has more mass $$v_1+v_1’=v_2+v_2’$$ $$v_1’=\frac{m_1-m_2}{m_1+m_2}v_1$$ $$v_2’=\frac{2m_1}{m_1+m_2}v_2$$
Inelastic — Stick #
- KE lost
- Momentum conserved (while no unbalanced ext forces)
- Maximum speed when m « M
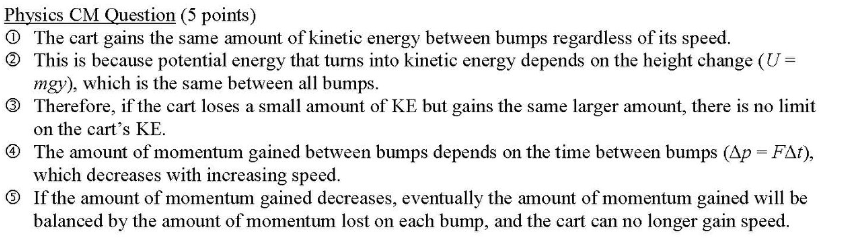
Impulse — Force and Time #
$$\vec J = \int \vec F dt = \vec F_\text{avg} \Delta t= \Delta \vec p = m \Delta \vec v$$
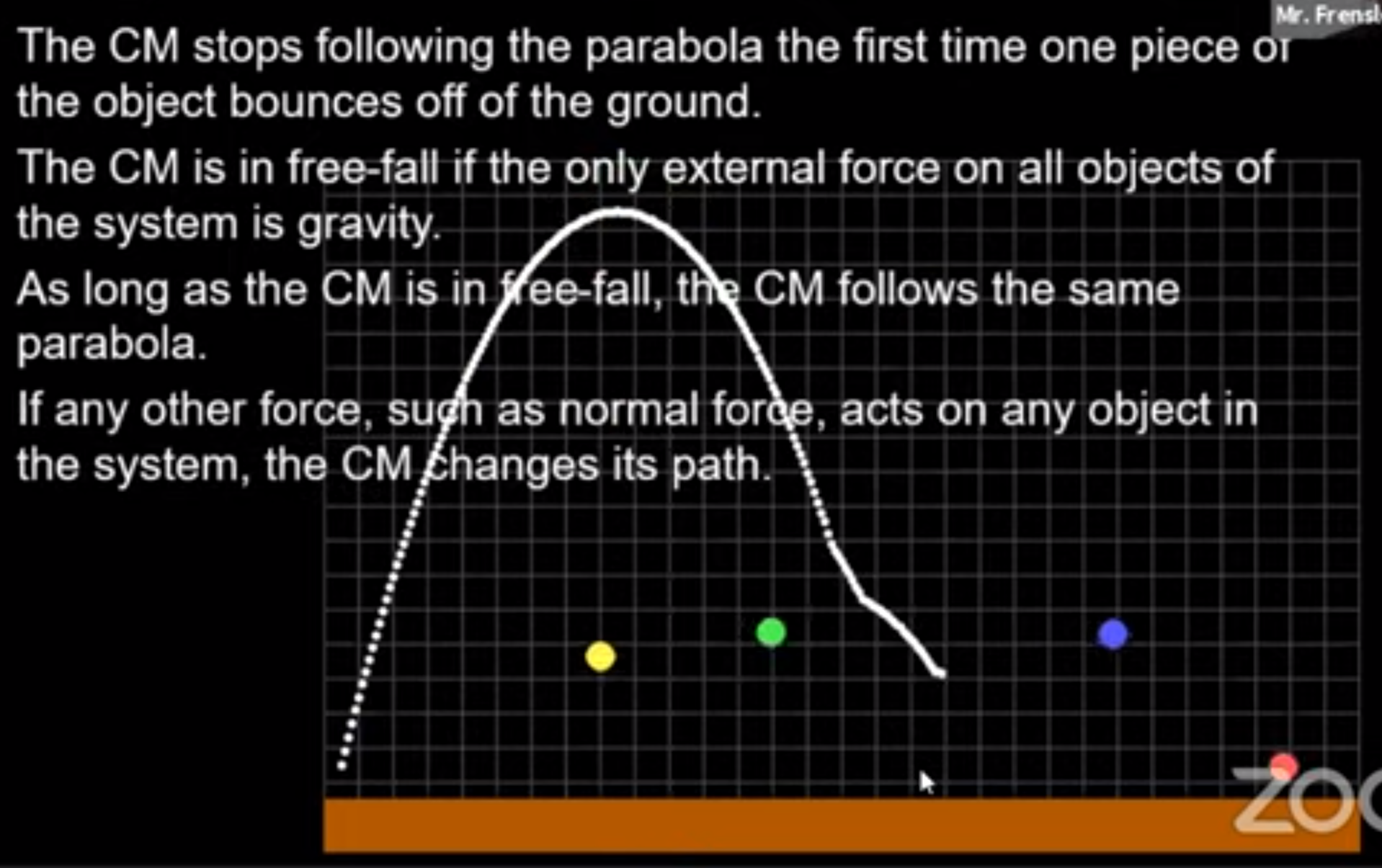
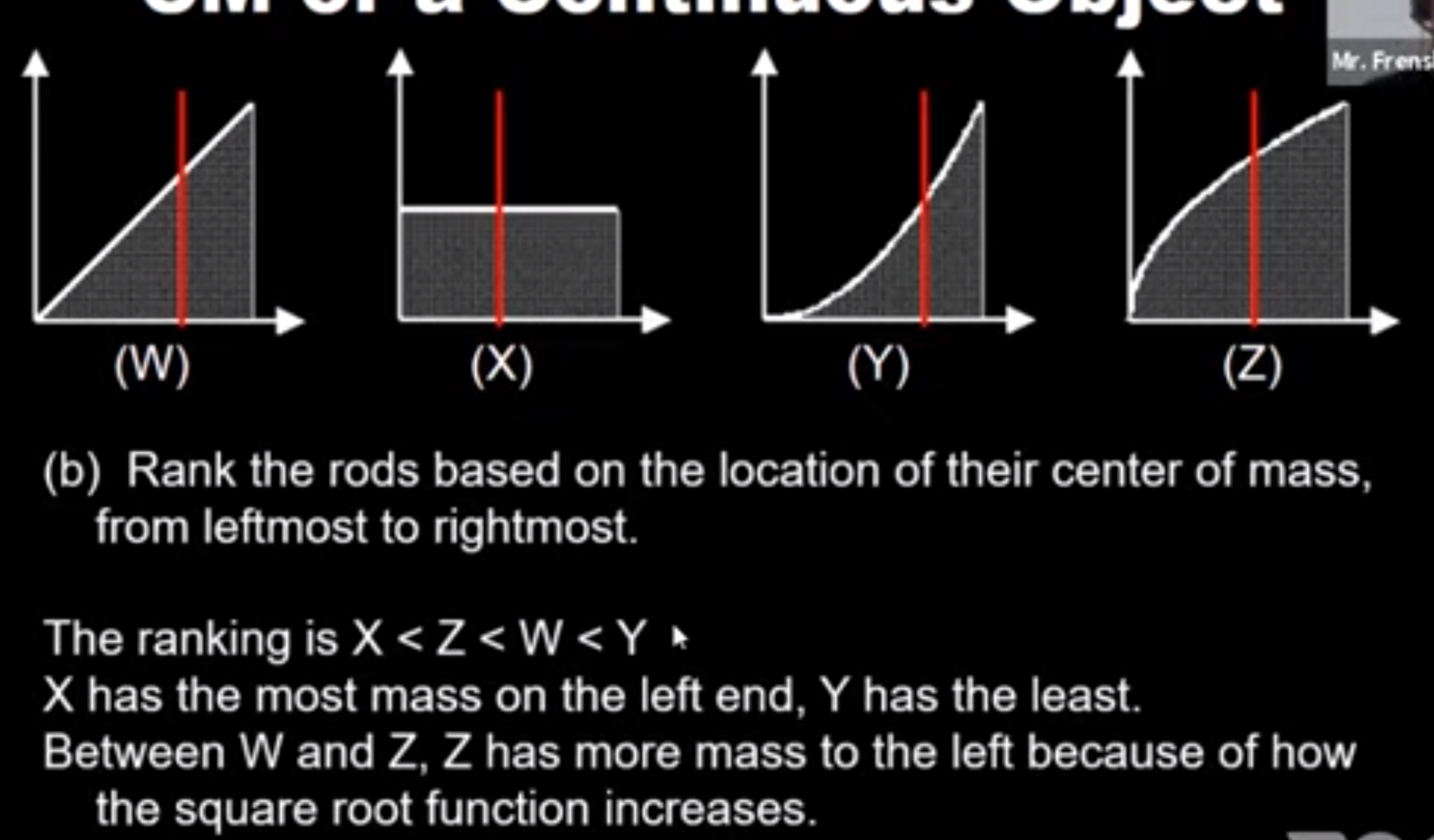
Center of Mass #
- When only gravity is acting on a object that is thrown, it will spin (pivot) around the center of mass
- If you split an object along the center of mass line, both sides aren’t equal in mass unless density / form is the same for both. $$x_\text{cm}=\frac{\Sigma(m_ix_i)}{\Sigma(m)}=\frac{\int x \lambda \cdot dx}{\Sigma M}$$ $$v_\text{cm}=\frac{\Sigma(m_iv_i)}{\Sigma(m)}$$ $$\Sigma p=mv_\text{cm}$$ $$\Sigma F=ma_\text{cm}$$
Practice #
Practice Qs

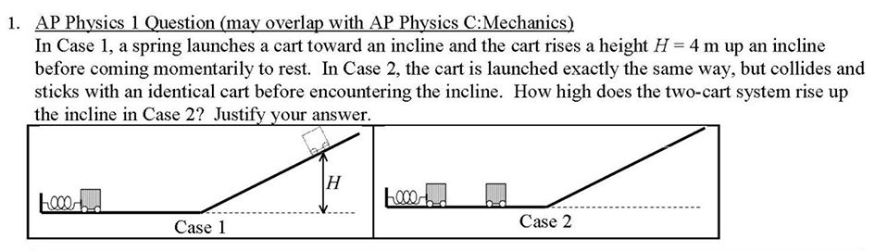
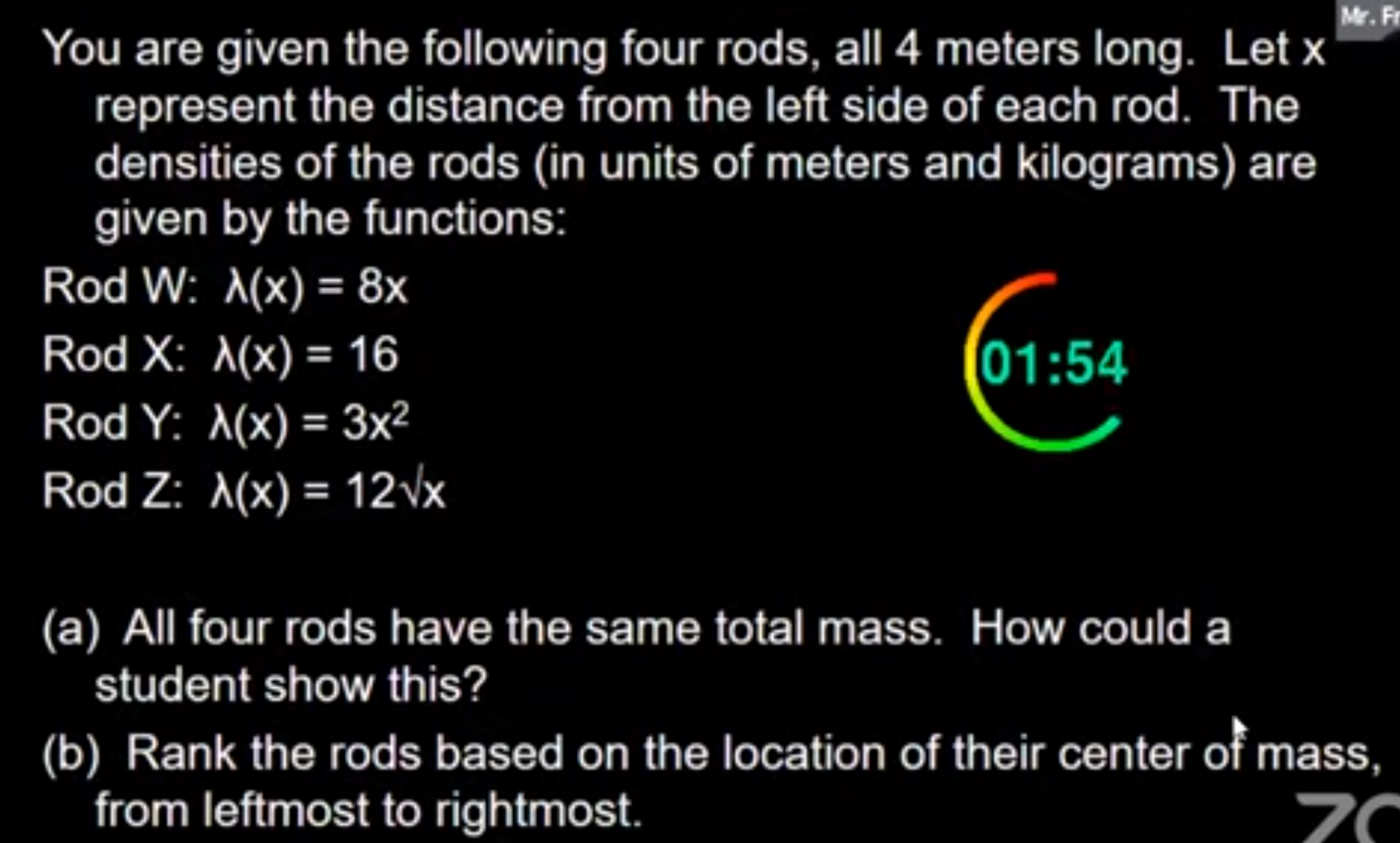 a. Integrate 0m to 4m
a. Integrate 0m to 4m







5. Rotation #
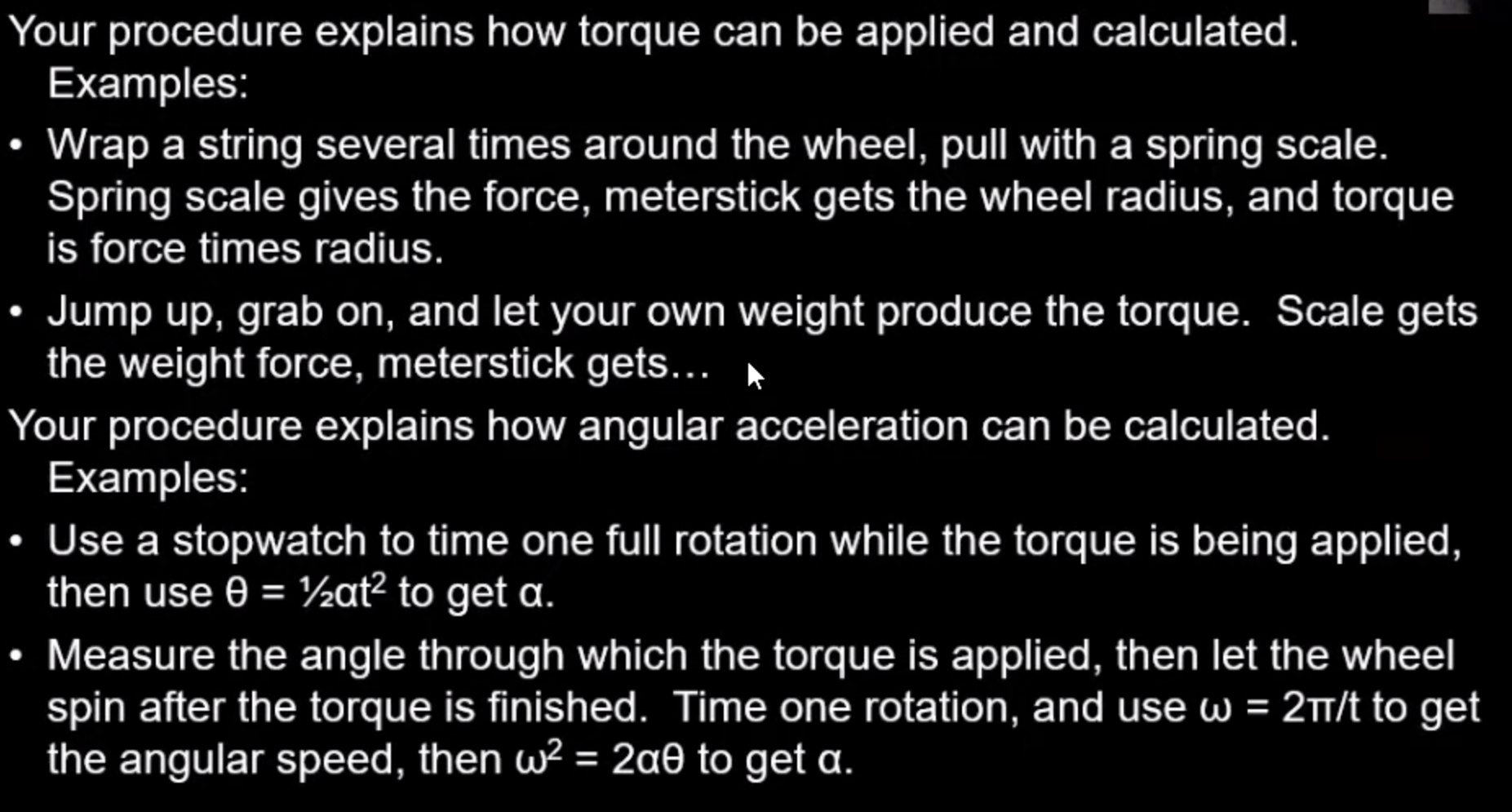
Rotational Kinematics #
Used when α is constant
- $$ \Delta \theta=\frac{1}{2}(\omega_f-\omega_i)\Delta t \text{ – no } \alpha$$
- $$ \omega_f=\omega_i+\alpha\Delta t \text{ – no } \theta$$
- $$\ \Delta \theta=\omega_i \Delta t+\frac{1}{2}\alpha \Delta t^2 \text{ – no } \omega_f$$ $$\ \Delta \theta=\omega_f \Delta t-\frac{1}{2}\alpha \Delta t^2 \text{ – no } \omega_i$$
- $$\omega_f^2=\omega_i^2+2\alpha \Delta \theta \text{ – no } t$$
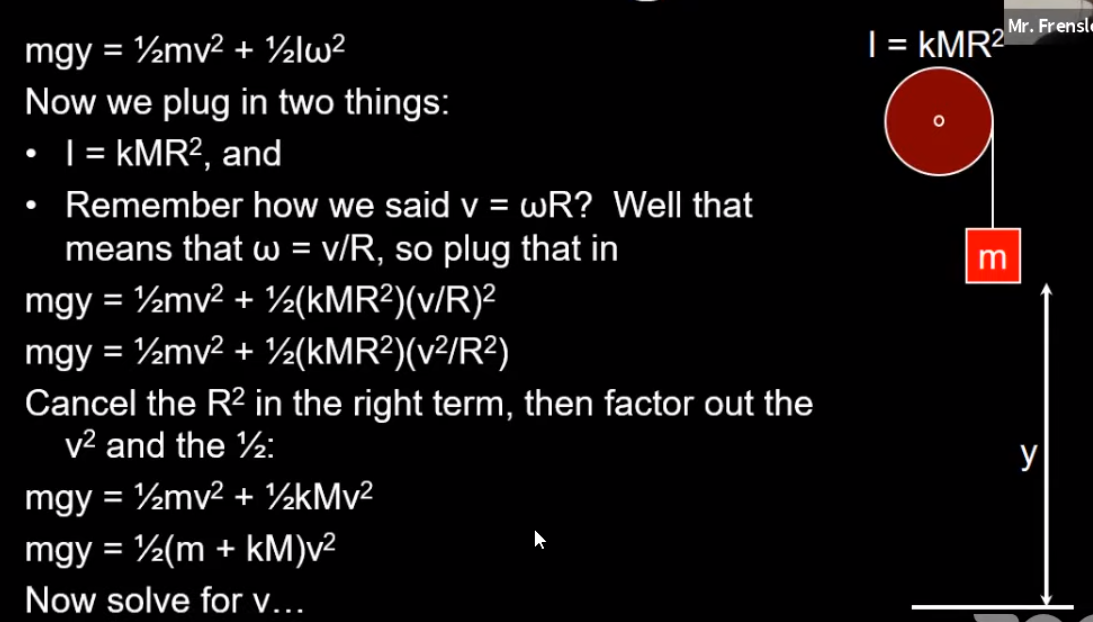
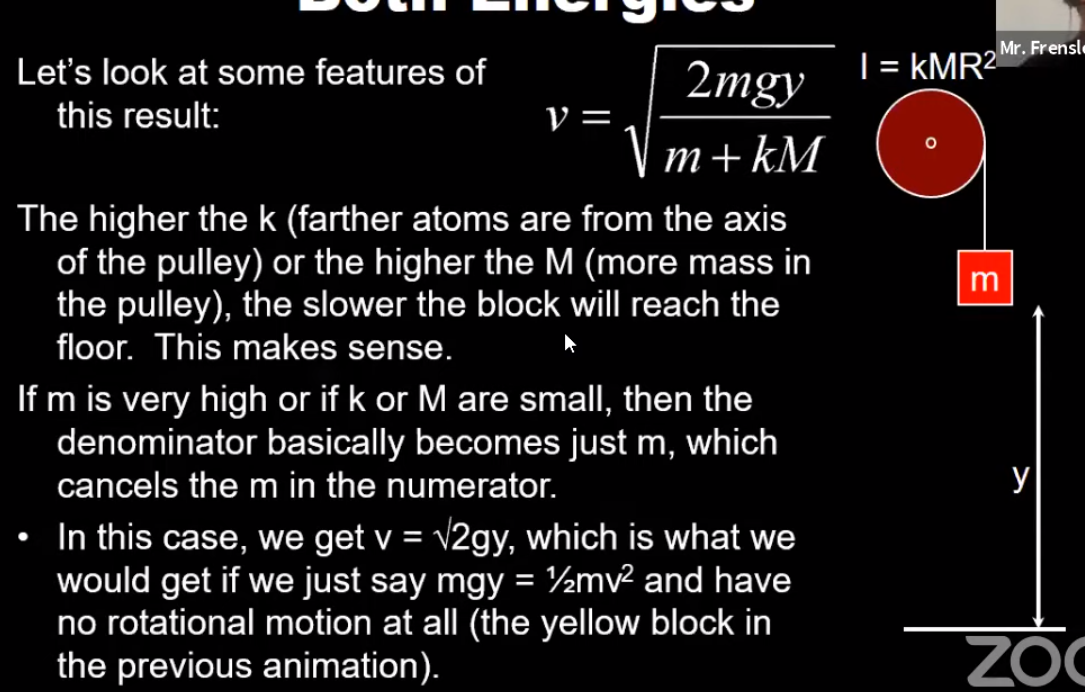
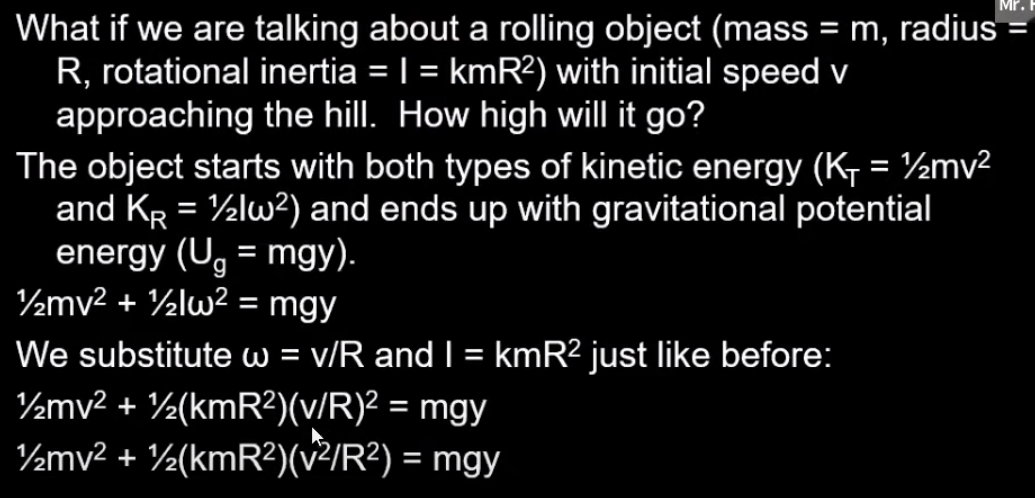
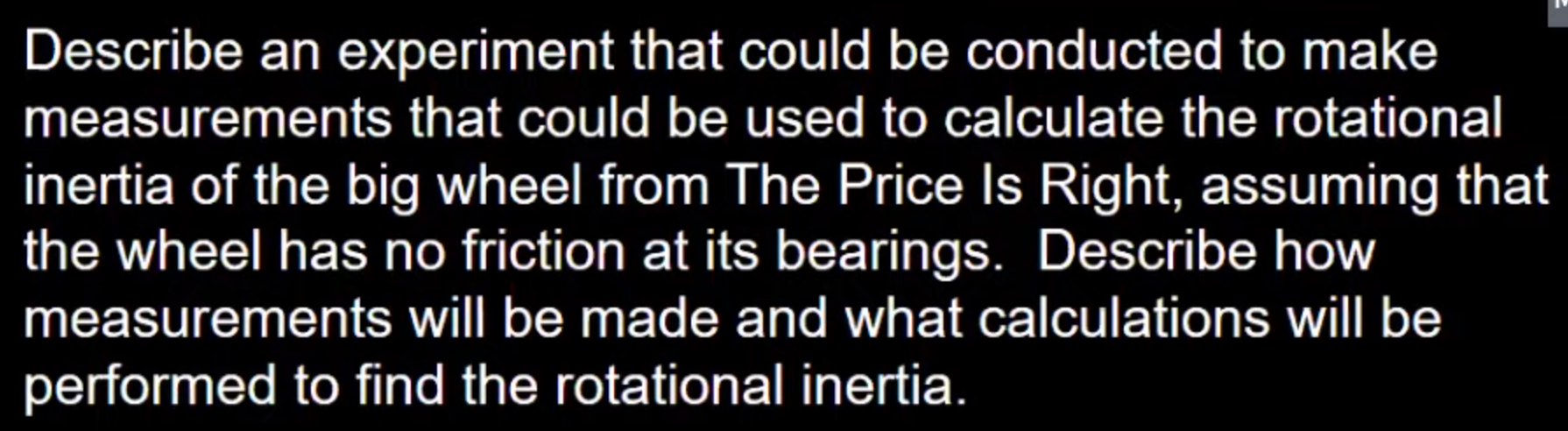
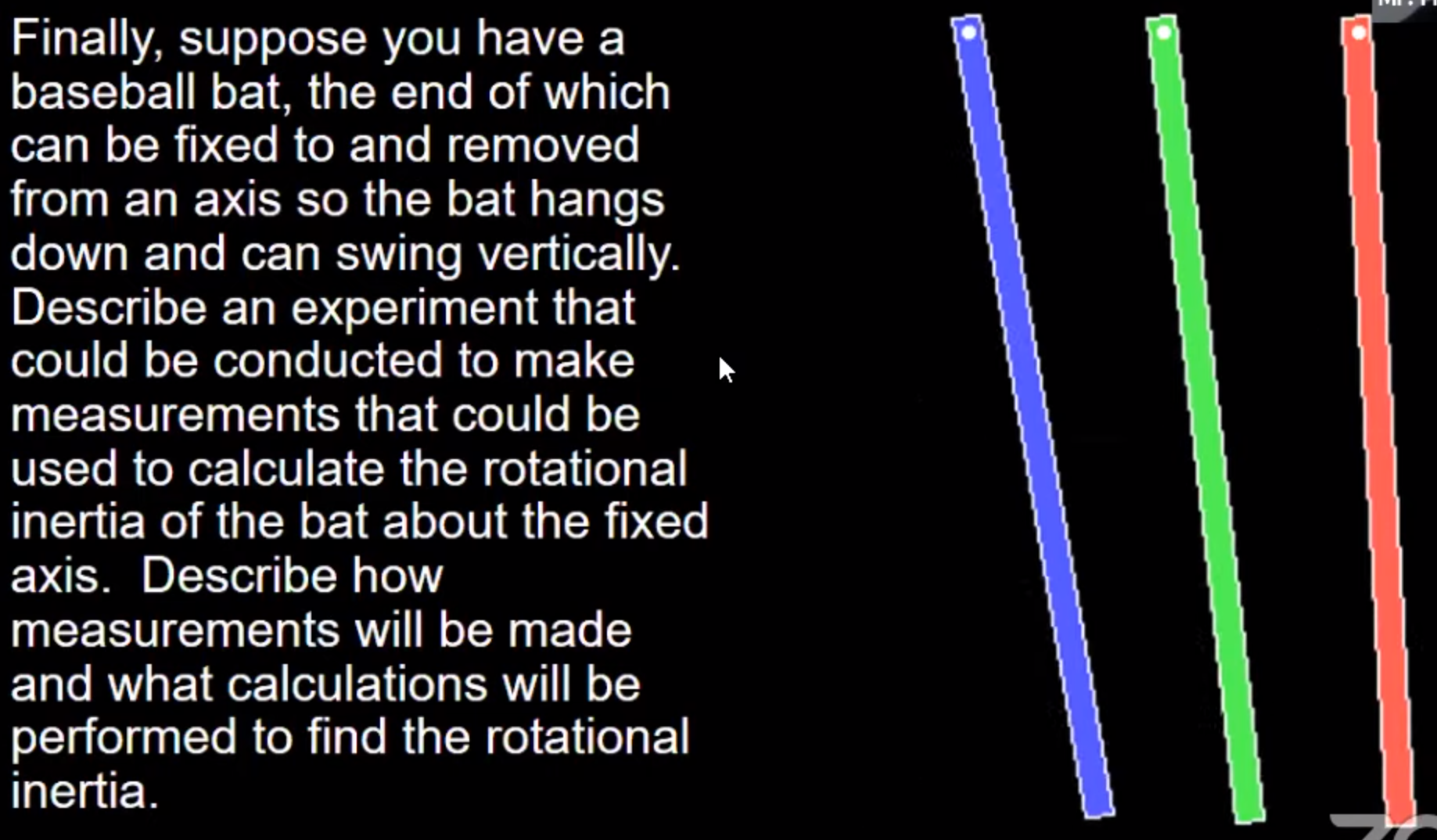
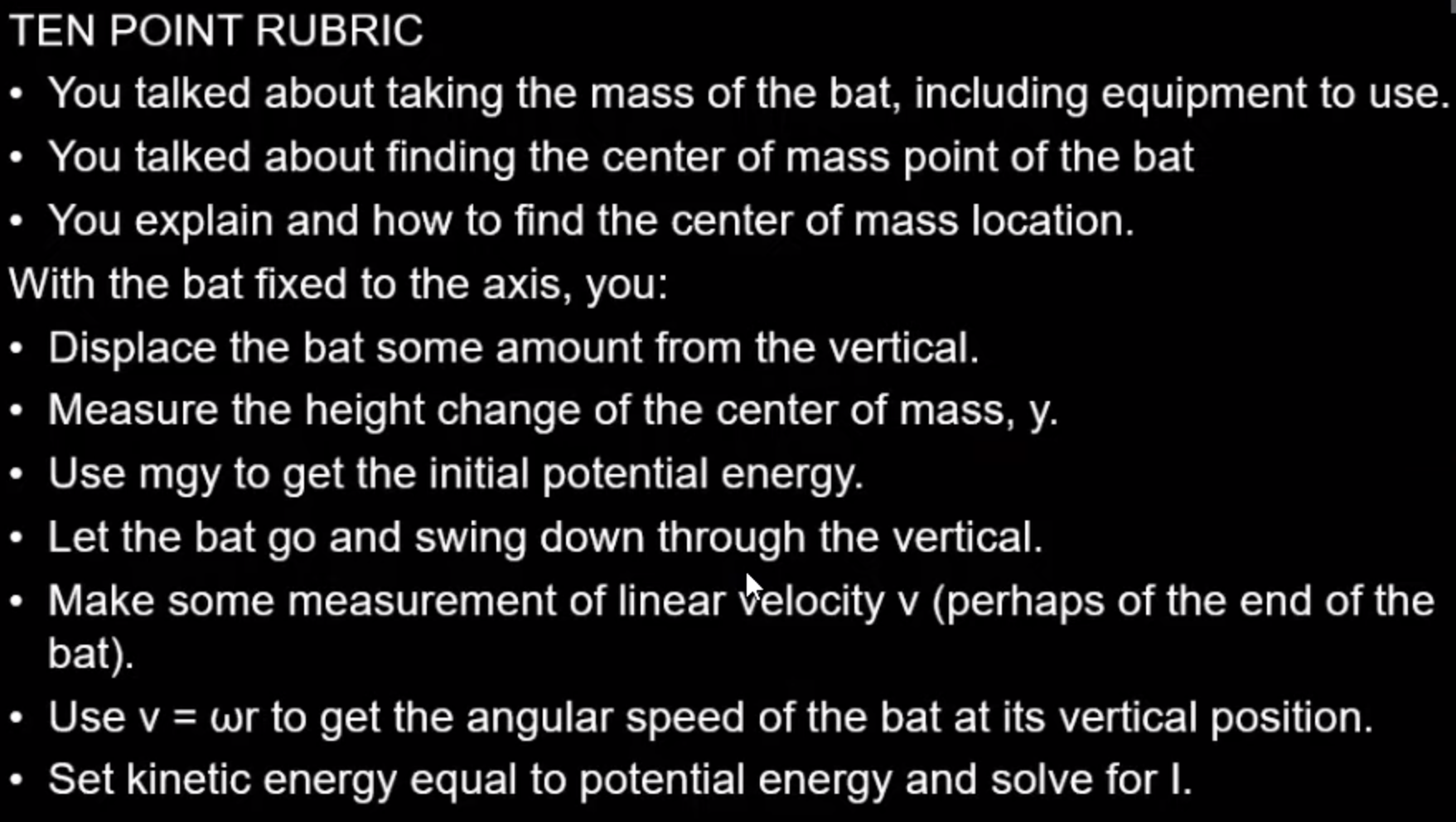
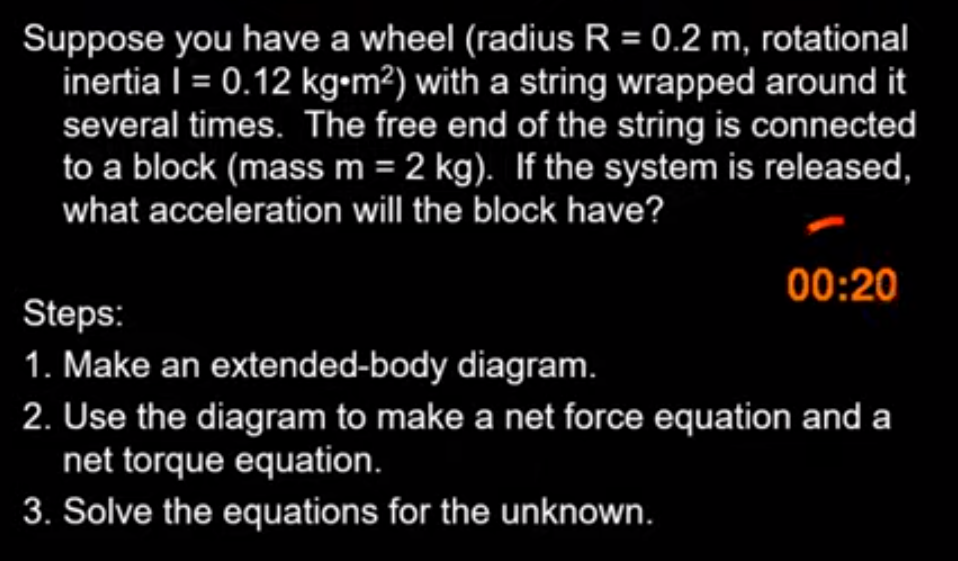
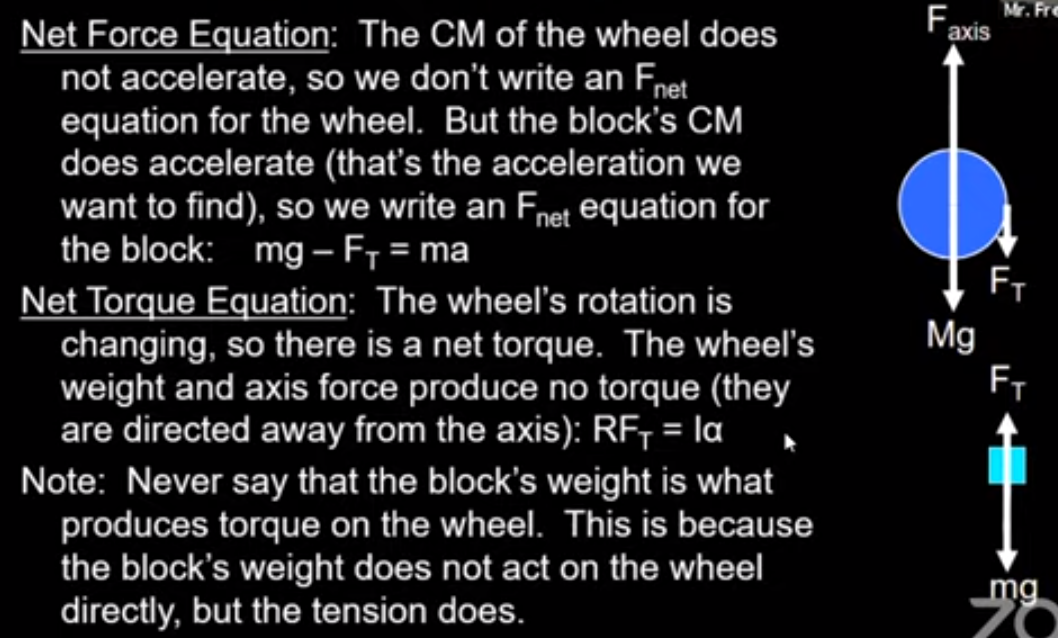
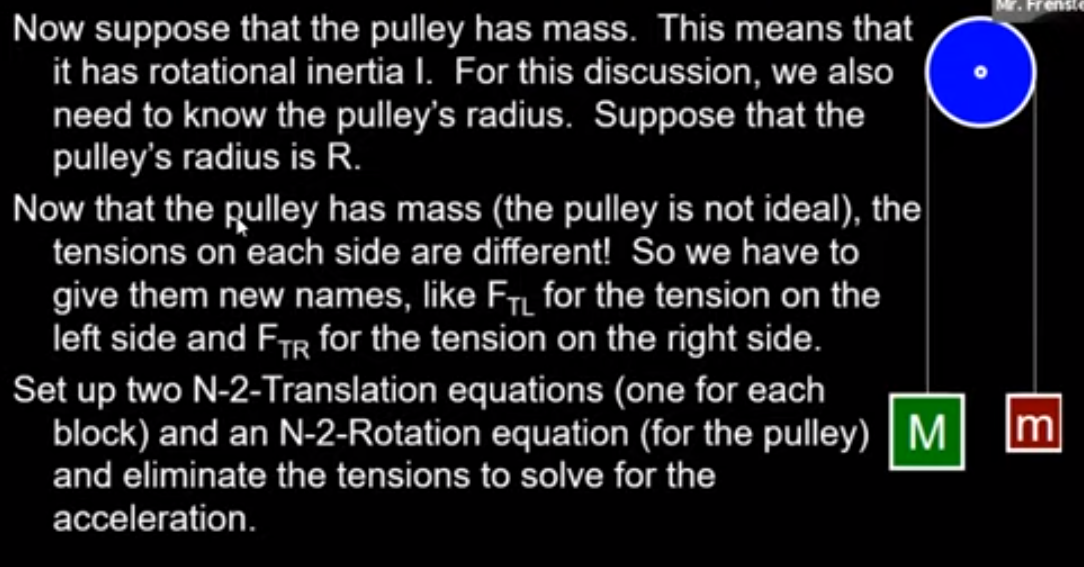
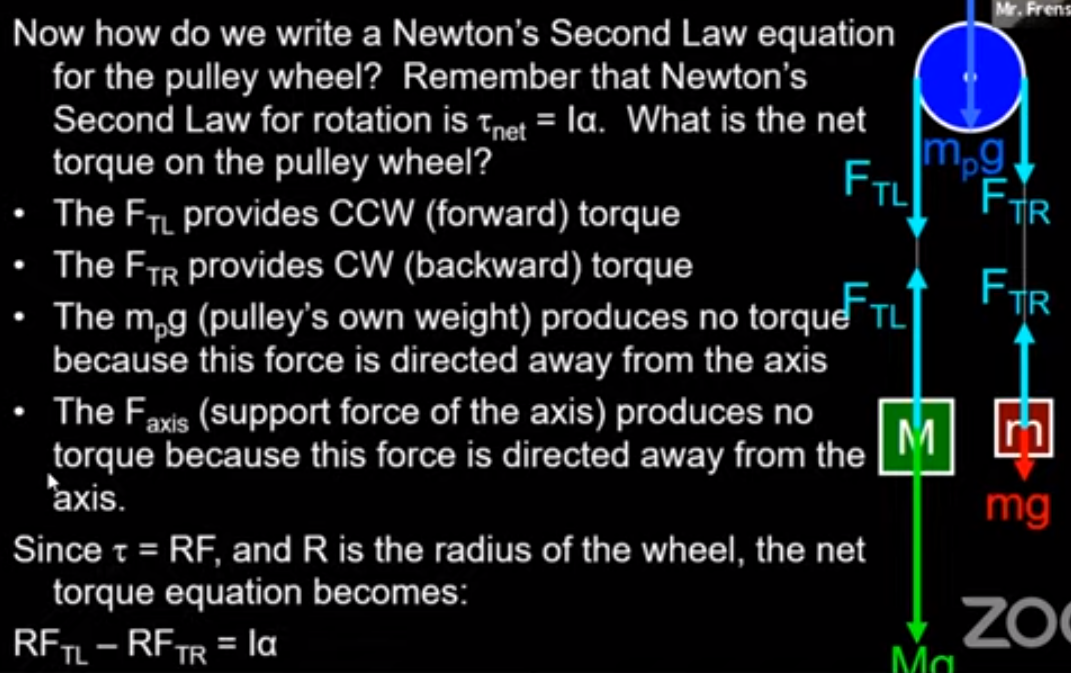
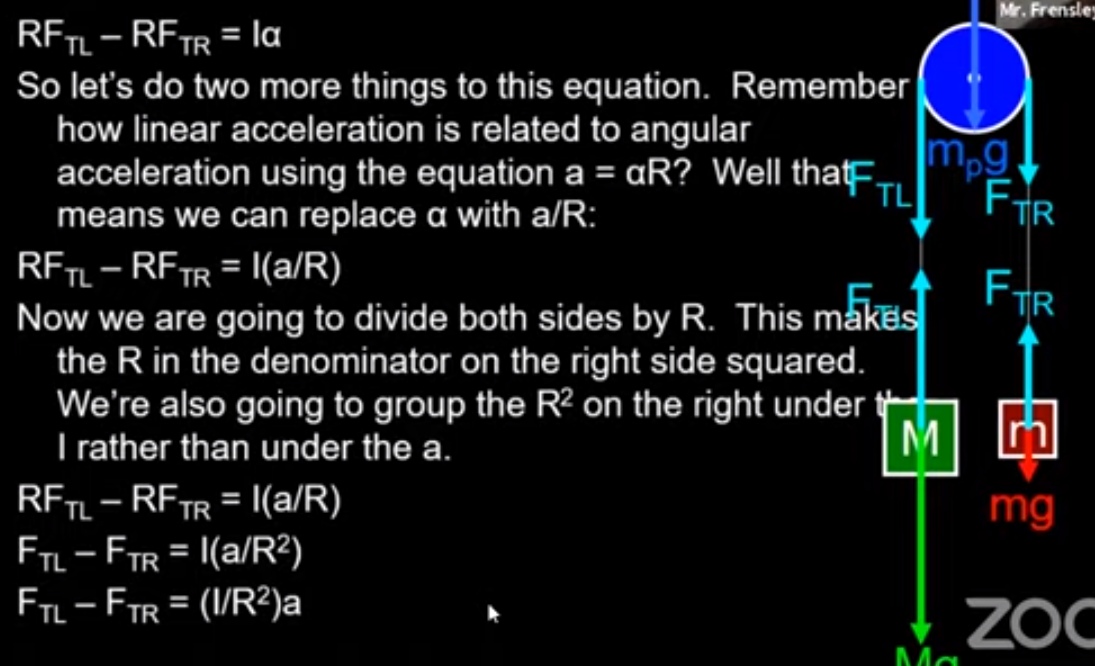
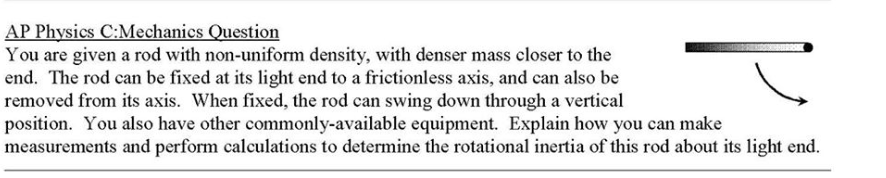
Rotational Inertia #
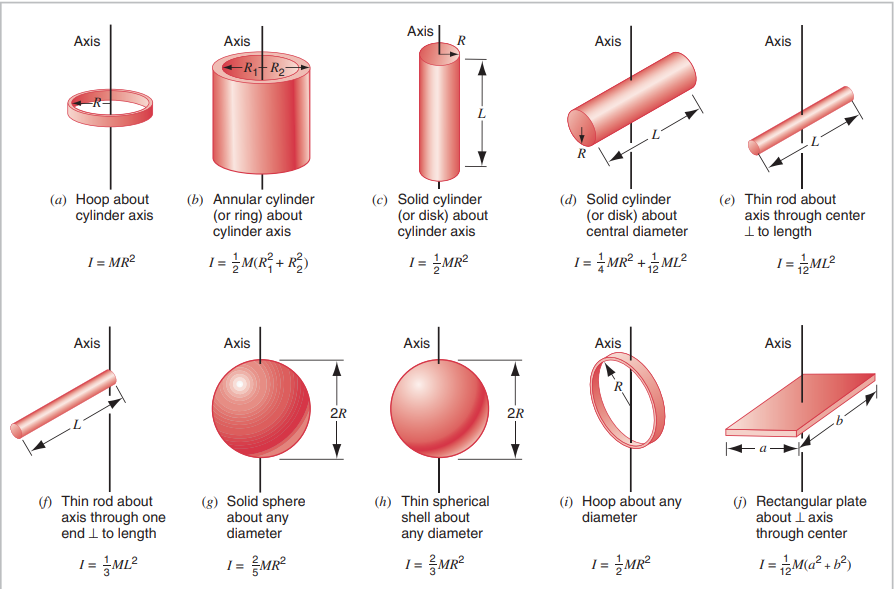
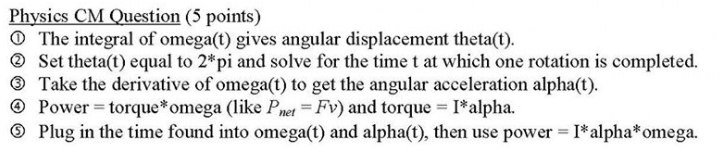
Pulleys
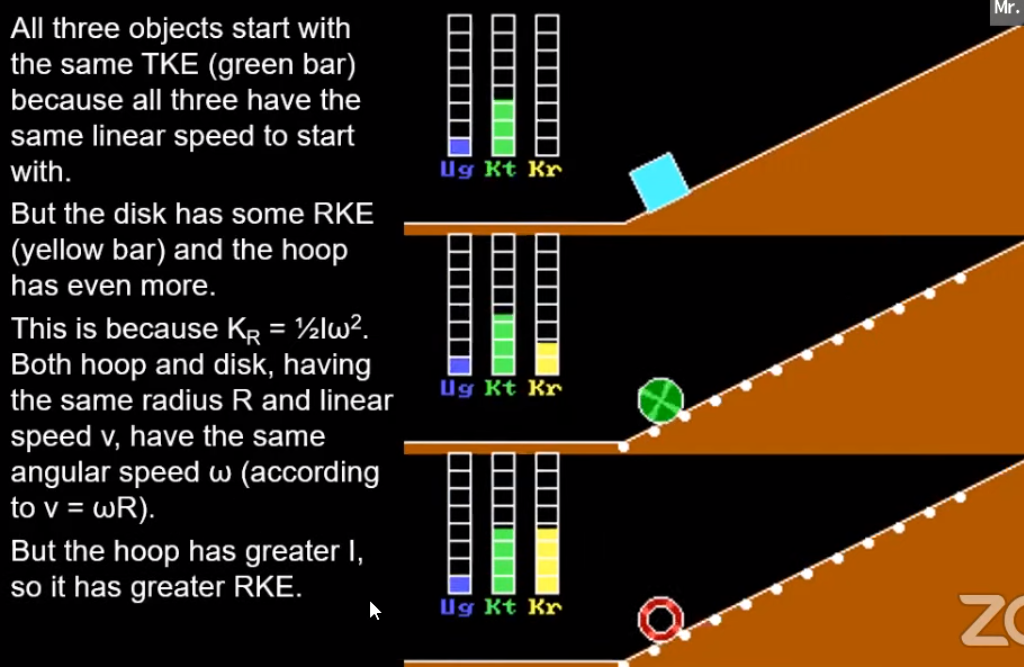
 with finishing with none+blue same time, then green, then red
with finishing with none+blue same time, then green, then red
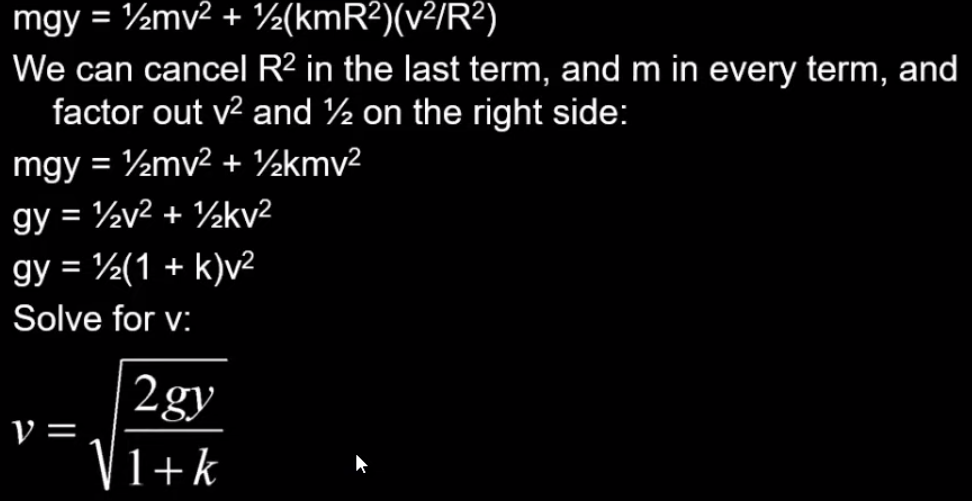
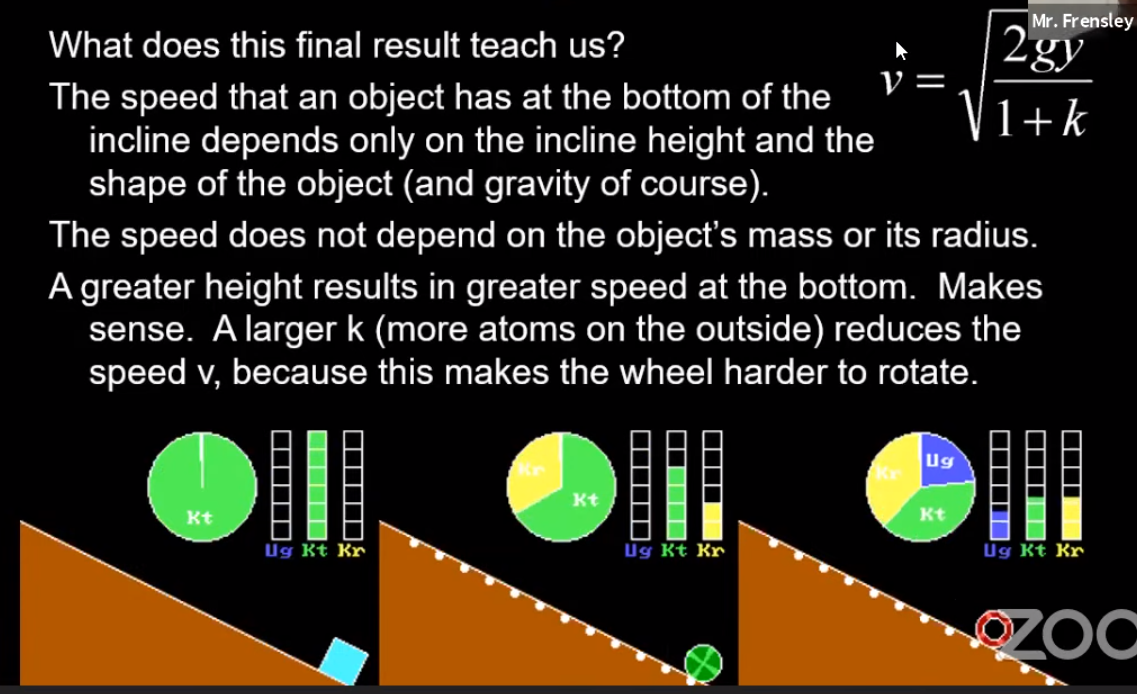
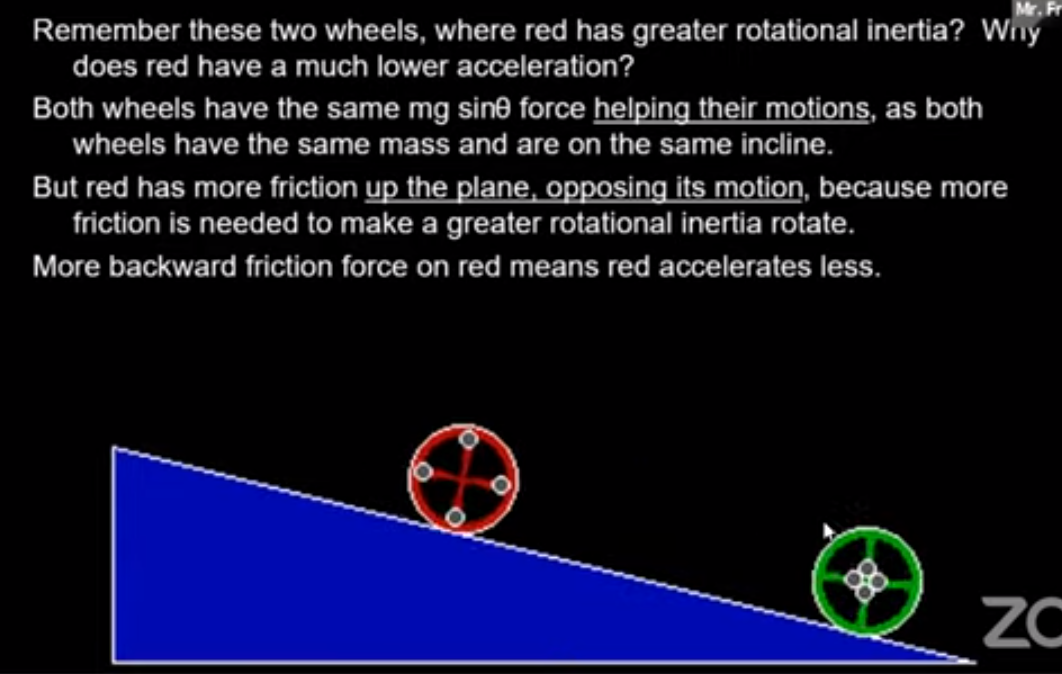
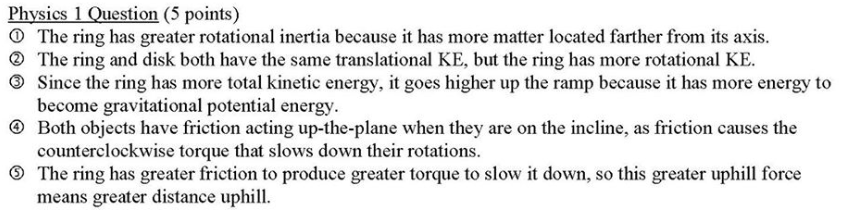
Rolling Down an Incline


Rolling Down an Incline + Slipping


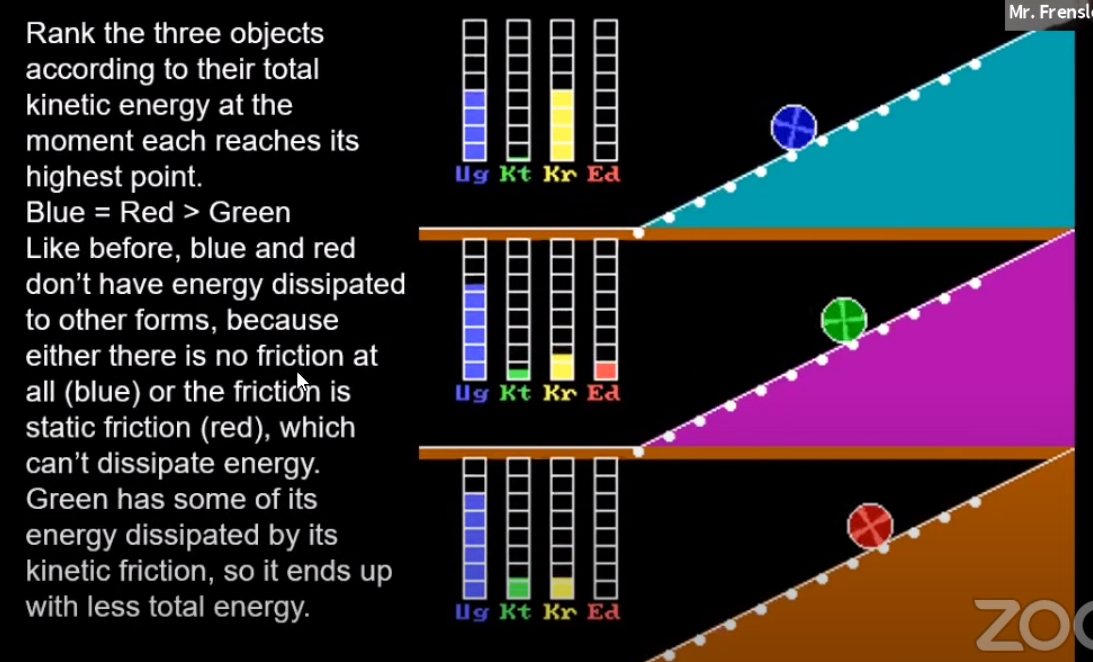
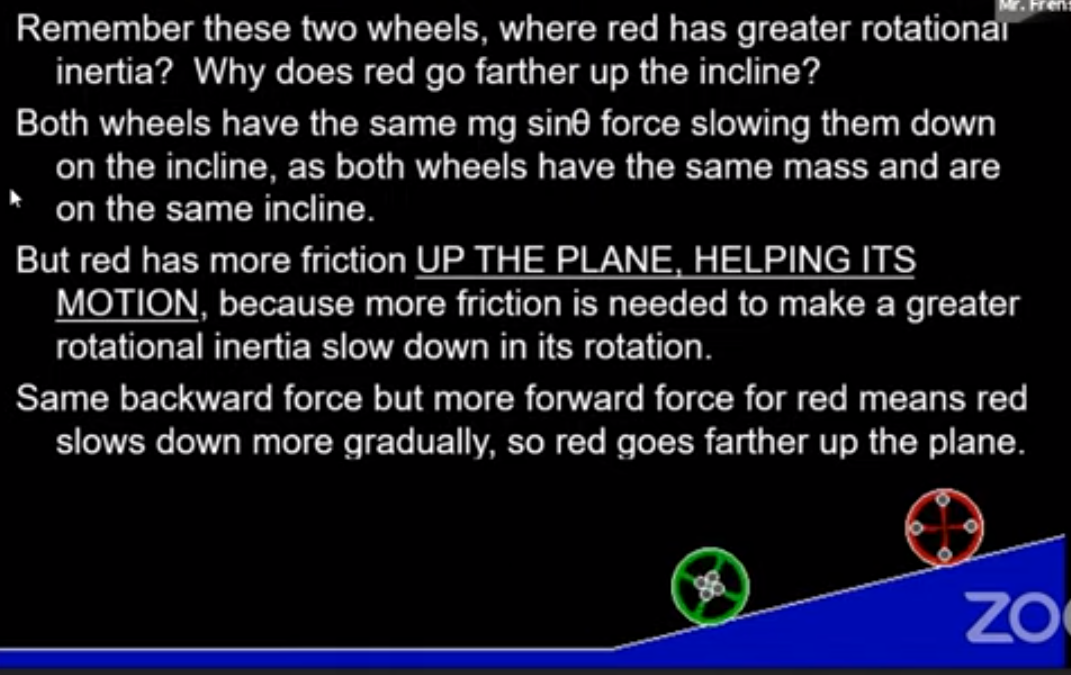
Rolling Up an Incline
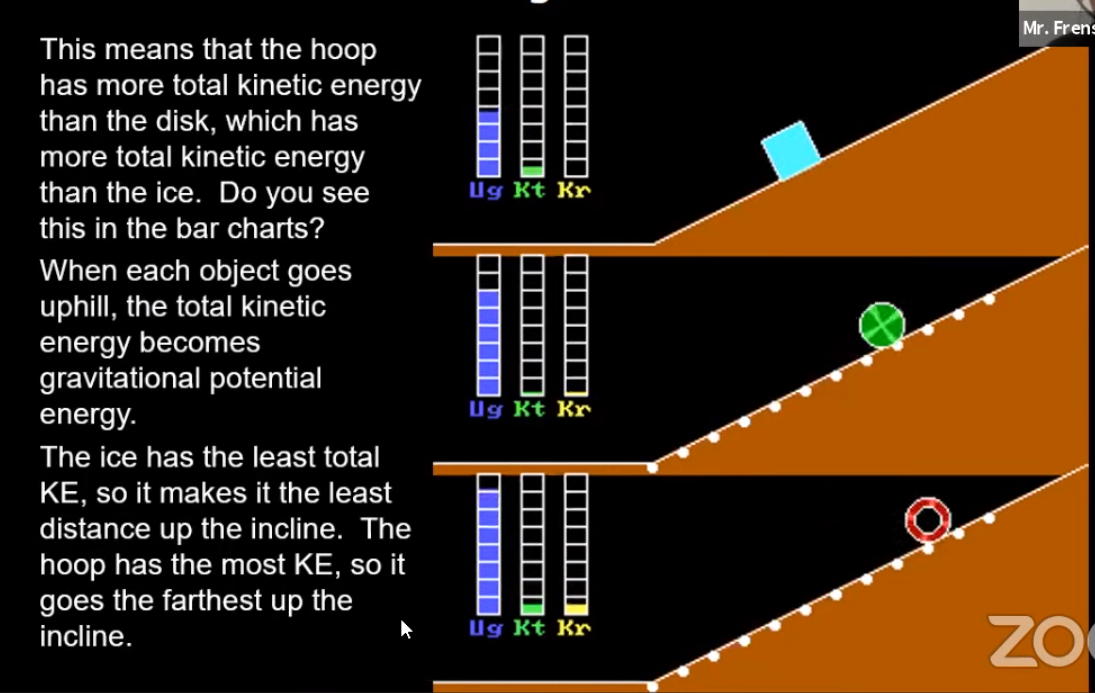

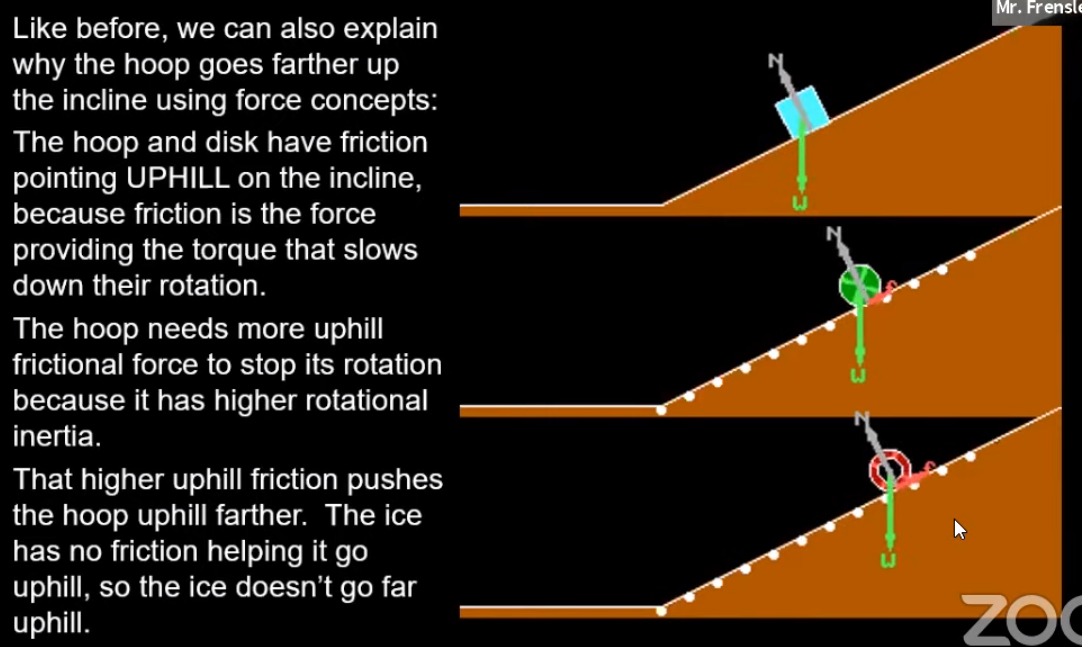
Rolling Up an Incline
Rolling Up an Incline + Slipping
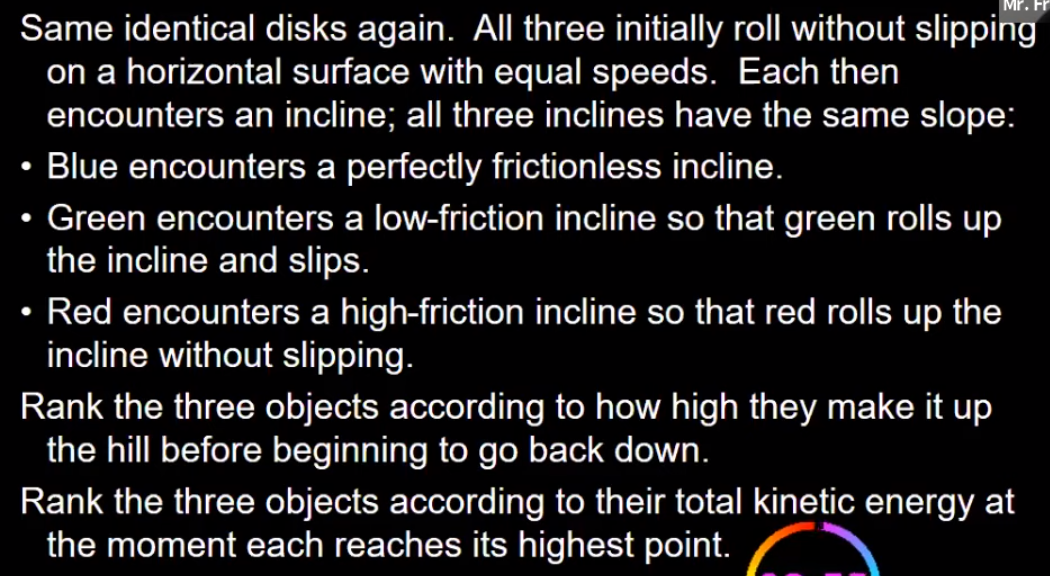
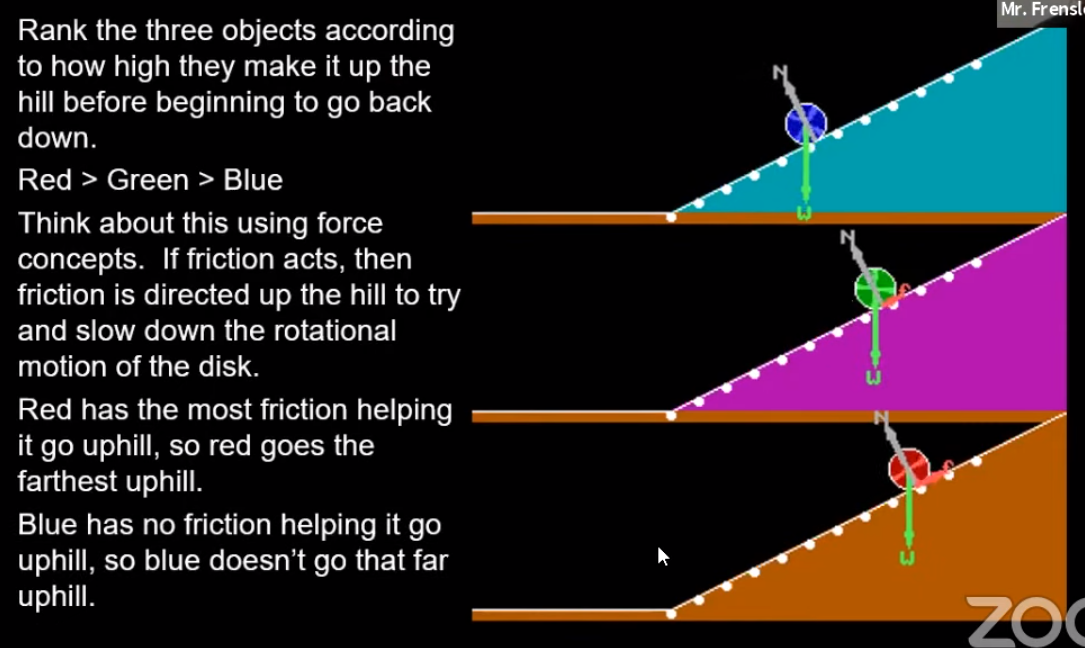
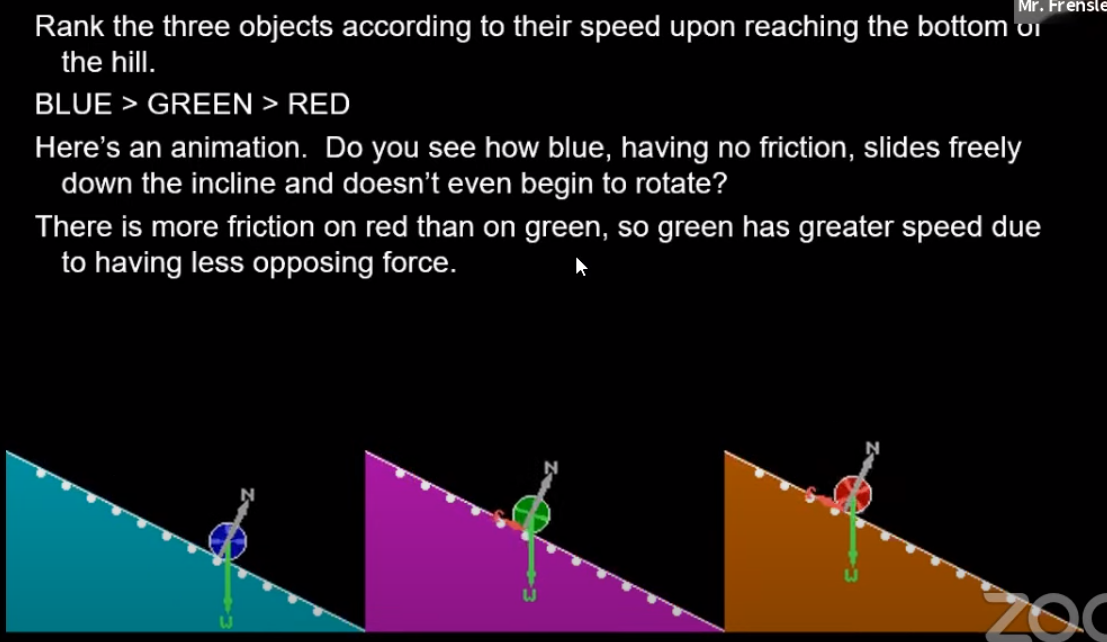
 Should be Blue > Green > Red (0)
Should be Blue > Green > Red (0)Practice Qs #
Practice Qs

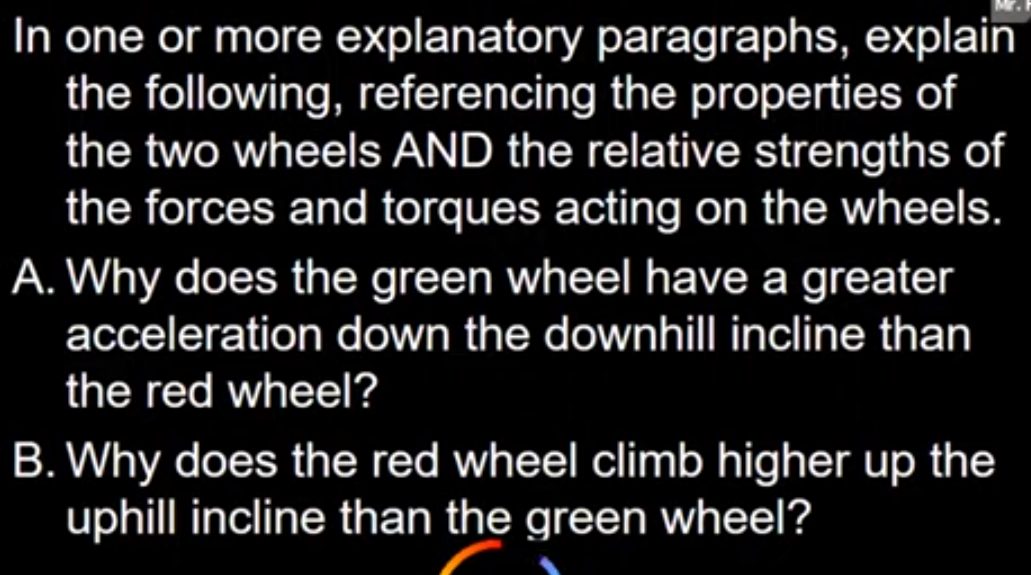 where green has lower moment of inertia, and red has larger moment of inertia
where green has lower moment of inertia, and red has larger moment of inertia
- Answer




 9
9
 10
10

 11
11
 12
12
 13
13